


Démo d'avancement du goto prédictif...
L'ATmega2560 de la MKS MINI au taquet...

Interprétation de la mesure à l’analyseur logique:
Le code exécuté dans l’interruption en elle même prend 3,375us (remise à zéro du compteur du timer comprise) avec une périodicité d’à peine 8us soit plus de 123 000 impulsions par seconde!!! On arrive ici à la limite extrême en se limitant à un seul moteur. En prenant un peu de marge cela signifie qu’en déplacement bi moteurs (A.D. et déclinaison en simultané) pour du goto on peut sans complexe espérer atteindre les 50Khz avec encore un peu de temps CPU pour le reste du programme.
Pour atteindre de telles performances, le code des interruptions moteur a été réduit à sa plus simple expression (comptage de pas + envoi impulsion moteur). Toutes les fonctions d’écriture -digitalWrite()- ont été optimisées avec l’excellente librairie Arduino-GPIO. Enfin, la gestion des accélérations/décélérations, changement de direction, activation/désactivation moteur, ont été dévolues à un timer dédié servant de « modulateur de fréquence » comme le montre cette capture...

Les avantages:
- Le fonctionnement des moteurs à vitesse constante est très peu gourmand en temps processeur.
- Cela ouvre la porte pour faire sans souci du goto en microstepping 1/16 là où d’autres projets sont contraints de basculer à la volée en 1/2 pas voire même en fullstep pour tenir la cadence.
- L’intégration du rattrapage de jeu et la correction d’erreur périodique pourront se faire au niveau du timer d’accélération sans impacter les performances des interruptions moteur.
Saturne et Mars au CN-212


CN-212 à F/D 12,4 + Barlow 2x + 5D MKIII. Shoot en mode vidéo RAW Magic Lantern et zoom 3x. Traitement avec MLVToMovie, AS2 et Registax 6.
D’ailleurs pour rappel, si vous êtes sur Mac, sachez que j’ai mis à dispo des versions Mac d’AS2, Registax 6 et même Iris...
http://mlvtomov.eliotis.com/goodies/index.html
MKS MINI sous les étoiles


Aperçu de la courbe d’accélération de type sinusoïdale...

Comme le montre le graphique, on obtient un démarrage et un arrêt très doux offrant un bon amortissement de l’inertie du télescope. Pour plus d’infos, voir cet ancien billet: Accélération/décélération: Sinus or not Sinus?
MKS MINI aux commandes...
https://www.youtube.com/watch?v=ckrY5U3mfkkLe projet a bien évolué depuis ses débuts. Simplifions, simplifions, simplifions! Reste à intégrer une led d’éclairage pour le viseur polaire, prévoir une connectique pour le câble de la motorisation de la mise au point et ajouter la deuxième connectique DB-9 pour la future télécommande tactile. A partir de là on sera pas mal niveau matériel côté monture.

Test motorisation mise au point du CN-212
Vref pour MKS MINI V2.0
I = Vref / 0.8.

Documentation Makerbase: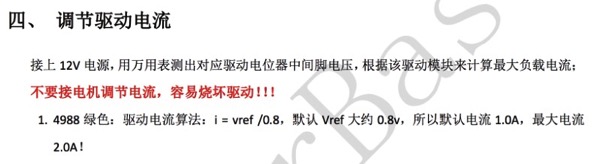
Traduction:
« 1. Algorithme actuel du driver 4988: i = vref /0.8.
Vref par défaut est environ 0.8v.
Le courant par défaut est 1.0A. Le courant maximal est 2.0A. »
Source: https://github.com/makerbase-mks/Datasheet/blob/master/Chinese%20datasheet/MKS%20MINI%20V2.0%20数据手册.pdf
C'est reparti... :)
Donc on récapitule:
- revoir l’électronique de la monture pour qu’elle soit plus simple à concevoir et pourquoi pas encore moins chère?
- déporter l’écran dans une raquette déportée.
- prévoir de piloter la mise au point.
Ok on en est donc là ou presque puisque j’ai déjà avancé sur la question vous vous en doutez. :) Concernant l’électronique, je pense avoir trouvé mon bonheur avec une carte pour imprimante 3D que je vais hacker pour mon usage: la MKS Mini V2.0 Makerbase.
Elle a tout pour me plaire:
- basée sur un Arduino MEGA dans la continuité de mon projet.
- dimensions relativement compactes.
- 4 drivers 4988 afin de piloter à la fois les deux moteurs pas à pas du télescope et potentiellement deux autres périphériques.
- technologie éprouvée puisque dérivée de la Mks standard équipant nombre d’imprimantes 3D DIY.
- tout petit prix: à peine plus de 20€ avec les frais de port sur aliexpress.com.
Il n’en fallait pas plus pour me lancer sur cette piste!
Je vous présente donc mon nouveau prototype déjà installé en bonne place sur ma monture (merci l’impression 3D)... :)
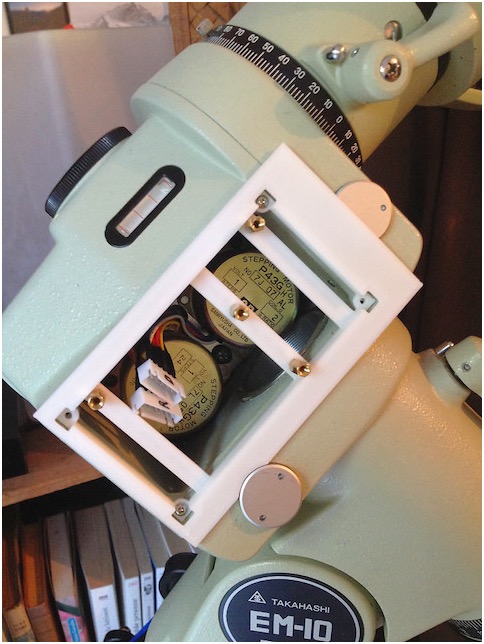
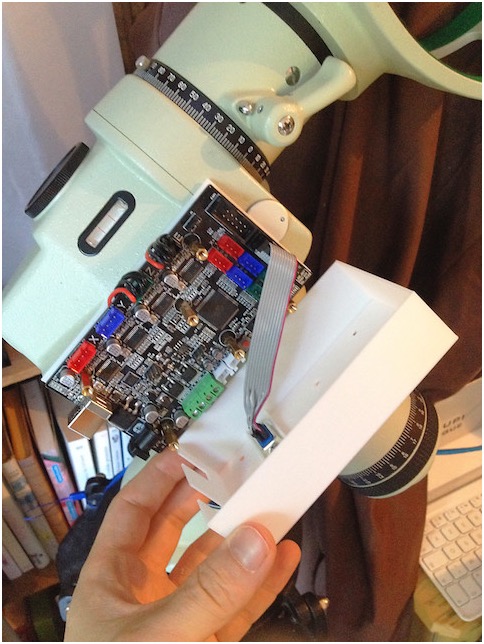

La manette SEGA a été conservée et j’ai prévu un second port DB9 pour la raquette de contrôle qui exploitera l’ancienne carte Arduino équipée de l’écran tactile. Ce dernier s’occupera de l’intelligence (base de donnée, GPS, GOTO, abaque polaire) et la carte Mks s’occupera des moteurs et du PEC.