


L'analyseur de précision de moteur pas à pas est au taquet!
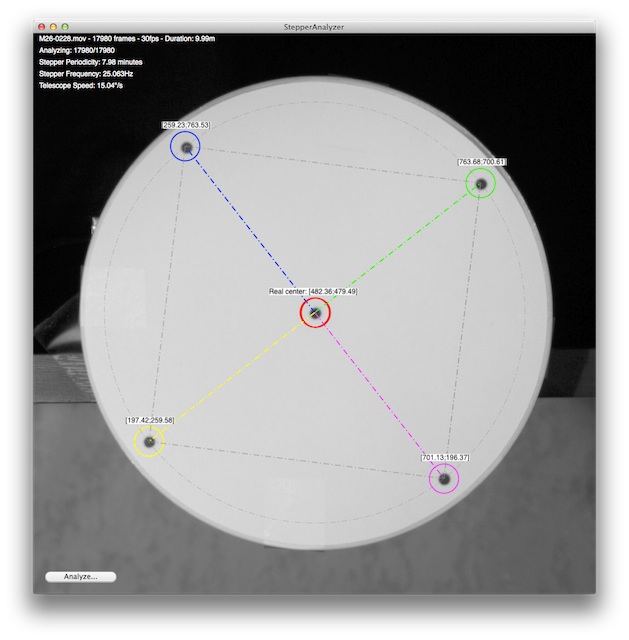
A titre d’illustration, voici les graphiques X/Y de l’évolution de la position de l’étoile noire centrale (cerclée en rouge dans l’analyseur) sur une période de rotation complète de la mire…
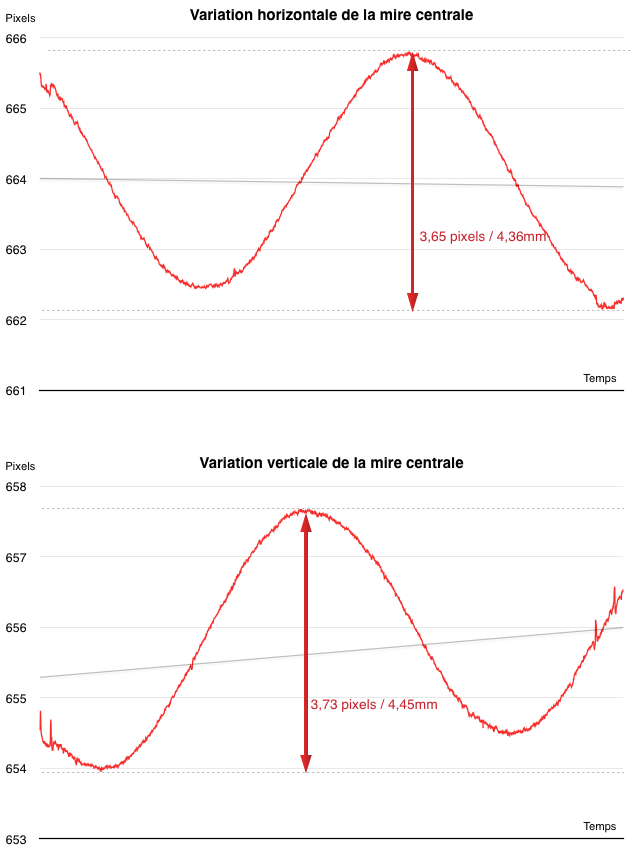
L’effet de sinusoïde est ici tout simplement lié au fait que mon « étoile noire » n’est pas parfaitement centrée sur l’axe moteur. Lors d’une rotation complète, elle oscille donc en horizontale et verticale car elle tourne autour de l’axe avec une amplitude max de l’ordre de 3,5 pixels si on ne prend pas en compte la dérive (le pied photo qui se tasse légèrement notamment en vertical sur le second graph). 3,5 pixels, c’est ridicule me direz vous et cela donne un très bon ordre de grandeur de la précision atteinte. On peut estimer le bruit résiduel à environ 0,05 pixel à peine!
Une fois toutes les positions des mires précisément analysées sur un peu plus d’une période, l’idée est d’analyser la variation de la position angulaire des mires externes par rapport à la vitesse de référence théorique (25Hz soit en sortie d’axe moteur 0,75° de déplacement chaque seconde). Et voici le résultat brute pour mon moteur…
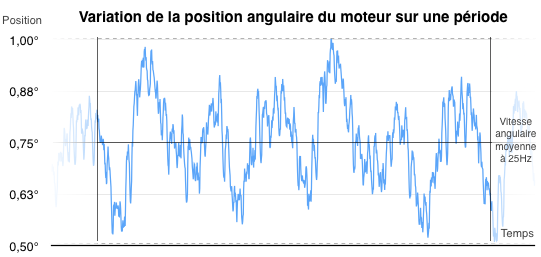
Erratique? Pas tant que cela et même loin s’en faut. Pour s’en convaincre, exportons les données vers l’analyseur d’erreur périodique PECPrep…

Et là: magie du spectacle. L’analyse de fréquence détecte et supprime toutes les fréquences. L’erreur résiduelle relève de l’encéphalogramme plat… :)

Notre signal mesuré est donc parfaitement reproductible. Cerise sur le gâteau, reprenons la table d’engrenages que j’avais calculé il y a quelques semaines…

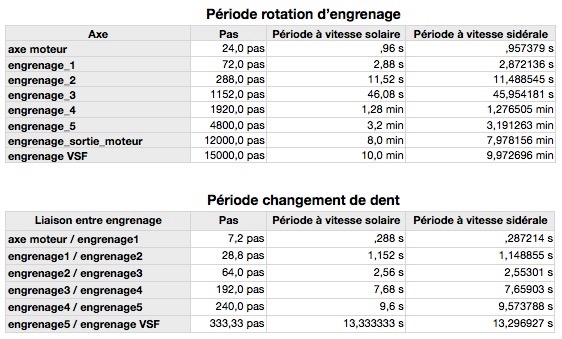
En y regardant de plus près, presque toutes les fréquences proposées par PECPrep sont clairement identifiables à la seconde près par rapport à ma table…
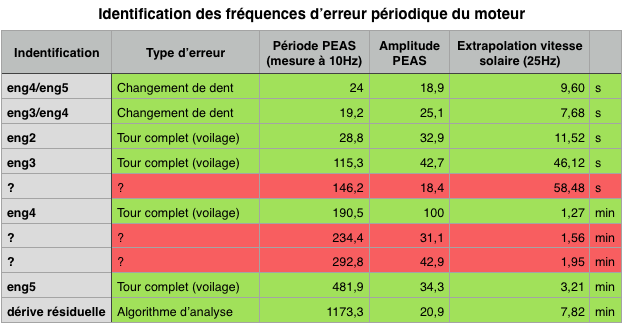
Voilà qui valide on ne peut mieux le concept de l’analyseur!
Dans les faits, l’analyseur va être un outil particulièrement précieux pour la mise au point de l’algorithme de correction d’erreur périodique avec le Arduino. Je pourrais ainsi contrôler la qualité du correcteur sur des données réelles sans sortir de chez moi. :D
Idéalement, il serait même intéressant de pouvoir faire cela en temps réel et non sur une séquence vidéo enregistrée. A méditer pour les prochaines nuits blanches…