


MKS MINI aux commandes...
https://www.youtube.com/watch?v=ckrY5U3mfkkLe projet a bien évolué depuis ses débuts. Simplifions, simplifions, simplifions! Reste à intégrer une led d’éclairage pour le viseur polaire, prévoir une connectique pour le câble de la motorisation de la mise au point et ajouter la deuxième connectique DB-9 pour la future télécommande tactile. A partir de là on sera pas mal niveau matériel côté monture.

Test motorisation mise au point du CN-212
C'est reparti... :)
Donc on récapitule:
- revoir l’électronique de la monture pour qu’elle soit plus simple à concevoir et pourquoi pas encore moins chère?
- déporter l’écran dans une raquette déportée.
- prévoir de piloter la mise au point.
Ok on en est donc là ou presque puisque j’ai déjà avancé sur la question vous vous en doutez. :) Concernant l’électronique, je pense avoir trouvé mon bonheur avec une carte pour imprimante 3D que je vais hacker pour mon usage: la MKS Mini V2.0 Makerbase.

Elle a tout pour me plaire:
- basée sur un Arduino MEGA dans la continuité de mon projet.
- dimensions relativement compactes.
- 4 drivers 4988 afin de piloter à la fois les deux moteurs pas à pas du télescope et potentiellement deux autres périphériques.
- technologie éprouvée puisque dérivée de la Mks standard équipant nombre d’imprimantes 3D DIY.
- tout petit prix: à peine plus de 20€ avec les frais de port sur aliexpress.com.
Il n’en fallait pas plus pour me lancer sur cette piste!
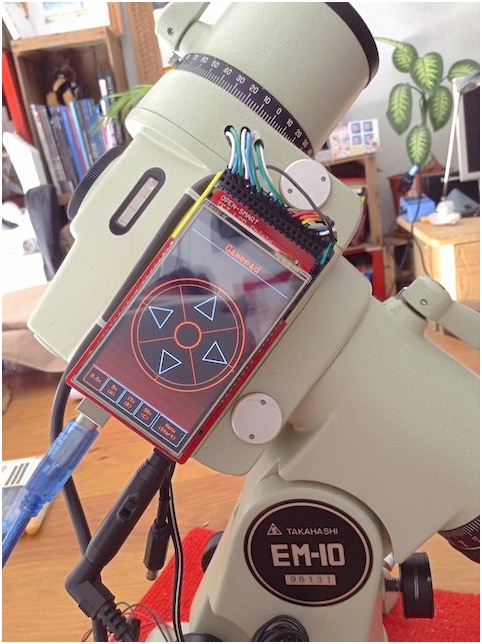
Je vous présente donc mon nouveau prototype déjà installé en bonne place sur ma monture (merci l’impression 3D)... :)
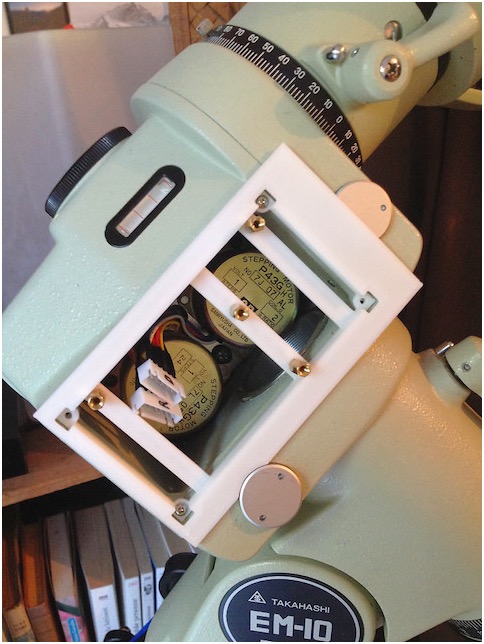
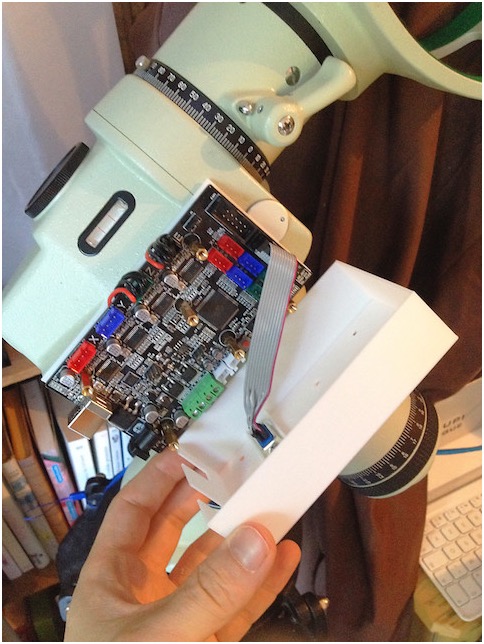

La manette SEGA a été conservée et j’ai prévu un second port DB9 pour la raquette de contrôle qui exploitera l’ancienne carte Arduino équipée de l’écran tactile. Ce dernier s’occupera de l’intelligence (base de donnée, GPS, GOTO, abaque polaire) et la carte Mks s’occupera des moteurs et du PEC.
TEVO Tarantula - Benchy 3D
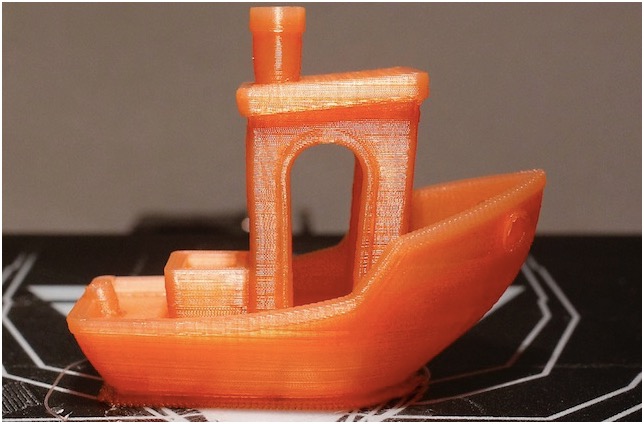
Jolly 3D printing torture test / 0,2mm par couche.
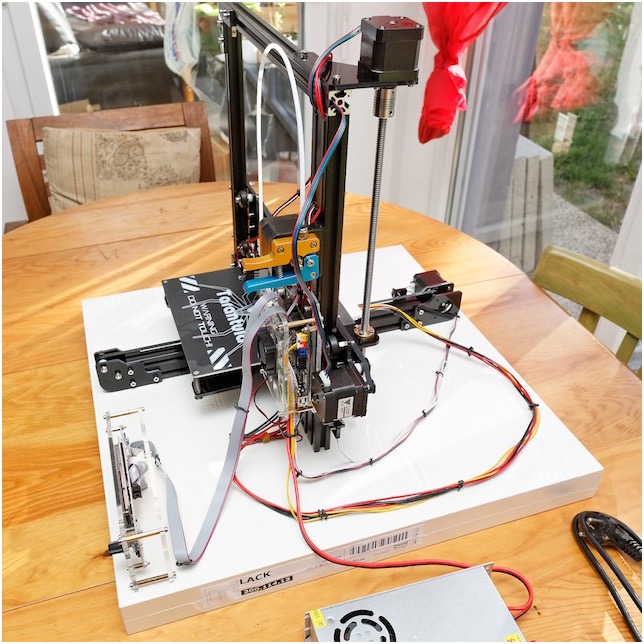
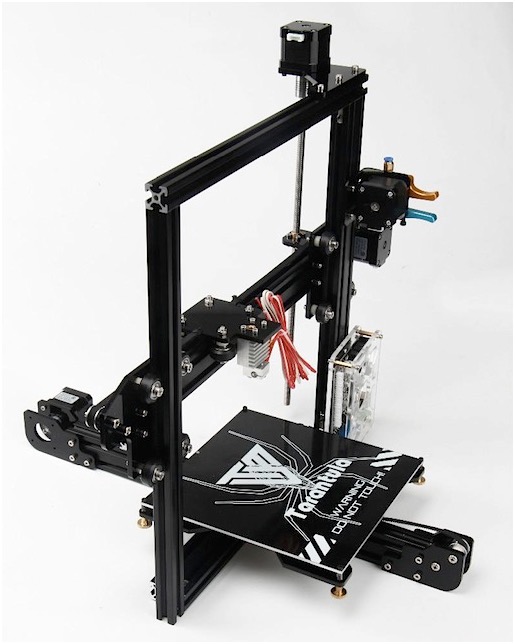
Montage de la TEVO Tarantula


Autant le dire tout de suite, la documentation papier est juste totalement insuffisante. il faut s’armer de patience et de tutos vidéo glanés sur YouTube pour s’en sortir sans trop de soucis.


Le montage en lui même n’est pas trop complexe pour peu de bien prendre son temps.


Et voilà la bête terminée...

Moment de vérité: le premier print…
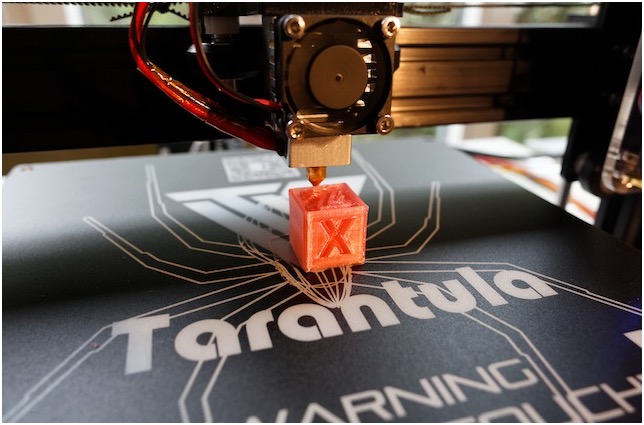

J’avoue que pour une première je suis assez bluffé.

Plus qu’à prendre le temps d’apprivoiser la bête et d’améliorer sa structure.
Imprimante 3D
En attendant son arrivée de Chine, autant lui préparer son vivarium… :)

Platine d'adaptation EM10/trépied Meade



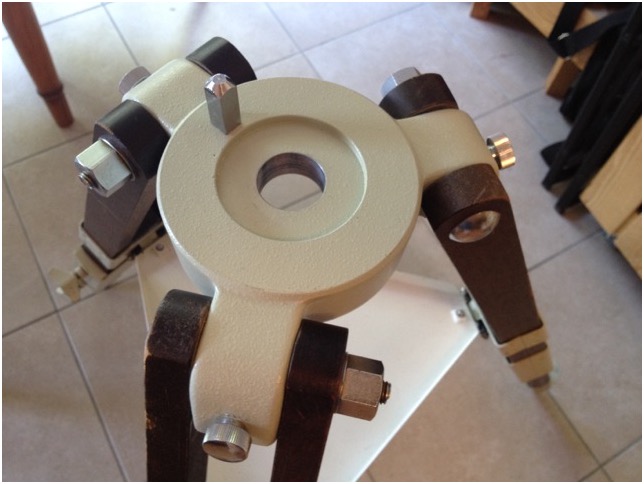

A partir de là, le modèle 3D a été réalisé par mes soins sous OpenSCAD en prenant les cotations au pied à coulisse sur la monture et le trépied…
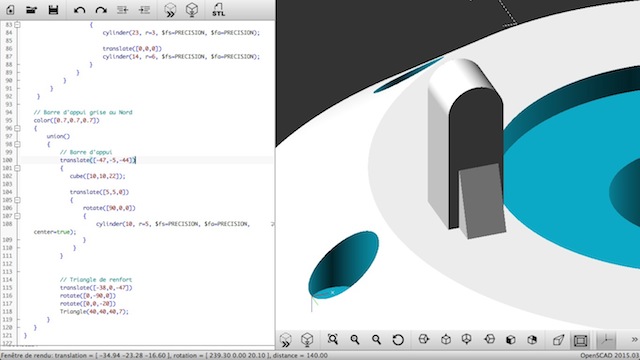

Puis la fabrication a été laissée au bon soin d’un ami disposant d’une imprimante 3D (25h d’impression tout de même! Merci Richard! :) )…

Avancement de l’impression...

Et voici la platine finale mise en place sur le trépied Meade...

Installation de la monture: comme papa dans maman… :)


Pas de doute, ça a de la gueule… :)

Reste à prévoir la tige filetée de remplacement de l’écarteur d’origine. Elle viendra solidariser la monture avec le trépied en passant par le trou central du dessous.
Si cette platine vous intéresse, j’ai mis le STL à disposition sur thingiverse.com…
>>>> Adapter for Takahashi Mount with Meade Field Tripod <<<<
Amélioration de l'écran tactile TFT 400x240

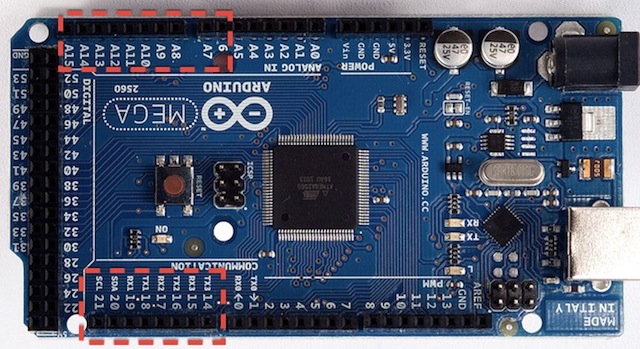
Un coup de Dremel plus tard, on récupère l’accès aux entrées/sorties A6 à A15 et 14 à 21…

Côté PCB, pas de problème pour la découpe puisque aucune piste ne passe par là. Il faut juste faire attention à ne pas toucher l’écran avec la mini scie circulaire du Dremel.
L’amélioration est très intéressante car on récupère l’accès à 18 entrées/sorties! Dans mon cas, l’accès aux liaisons séries 1, 2 et 3 va être tout particulièrement utile. Je vais ainsi pouvoir connecter la puce GPS et la puce Bluetooth en hardware. :)
Et pour finir un aperçu du prototype actuel démonté et placé sur un support bricolé et décoré avec ma fille (on ne voit pas bien sur la photo mais il y a des planètes et des étoiles dessinées)…

Pour rappel, le lien vers l’écran TFT 240x400 (7,31€):
http://www.volumerate.com/product/open-smart-touch-screen-expansion-shield-w-touch-pen-for-arduino-450238
L'analyseur de précision de moteur pas à pas est au taquet!
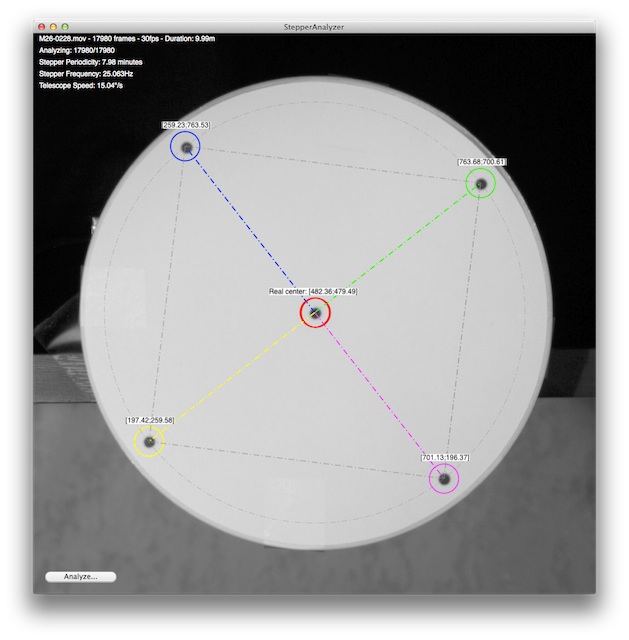
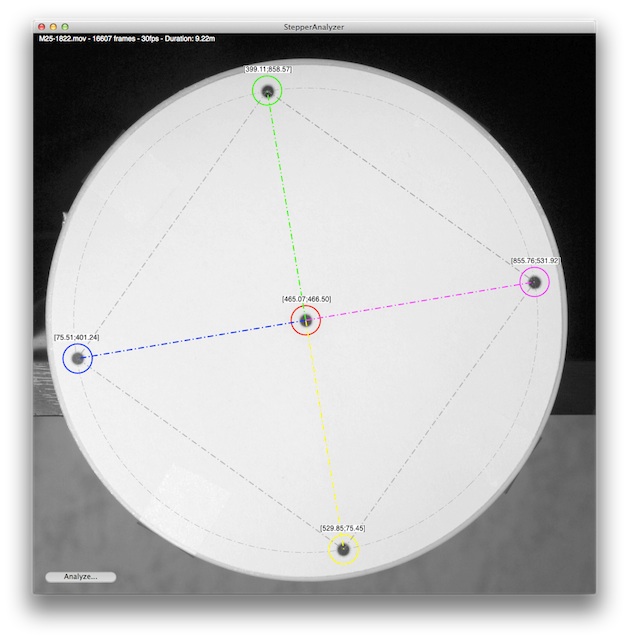
A titre d’illustration, voici les graphiques X/Y de l’évolution de la position de l’étoile noire centrale (cerclée en rouge dans l’analyseur) sur une période de rotation complète de la mire…
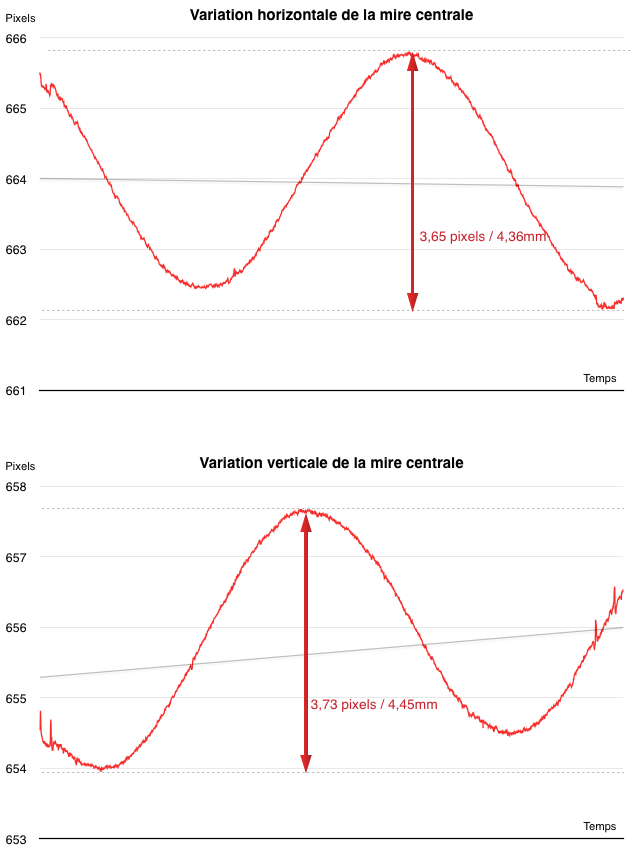
L’effet de sinusoïde est ici tout simplement lié au fait que mon « étoile noire » n’est pas parfaitement centrée sur l’axe moteur. Lors d’une rotation complète, elle oscille donc en horizontale et verticale car elle tourne autour de l’axe avec une amplitude max de l’ordre de 3,5 pixels si on ne prend pas en compte la dérive (le pied photo qui se tasse légèrement notamment en vertical sur le second graph). 3,5 pixels, c’est ridicule me direz vous et cela donne un très bon ordre de grandeur de la précision atteinte. On peut estimer le bruit résiduel à environ 0,05 pixel à peine!
Une fois toutes les positions des mires précisément analysées sur un peu plus d’une période, l’idée est d’analyser la variation de la position angulaire des mires externes par rapport à la vitesse de référence théorique (25Hz soit en sortie d’axe moteur 0,75° de déplacement chaque seconde). Et voici le résultat brute pour mon moteur…
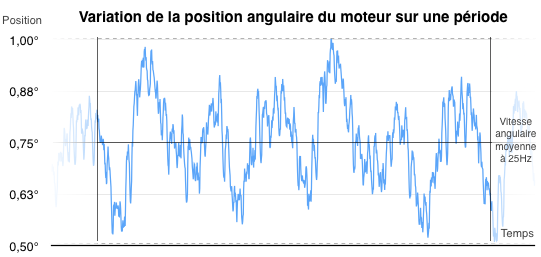
Erratique? Pas tant que cela et même loin s’en faut. Pour s’en convaincre, exportons les données vers l’analyseur d’erreur périodique PECPrep…

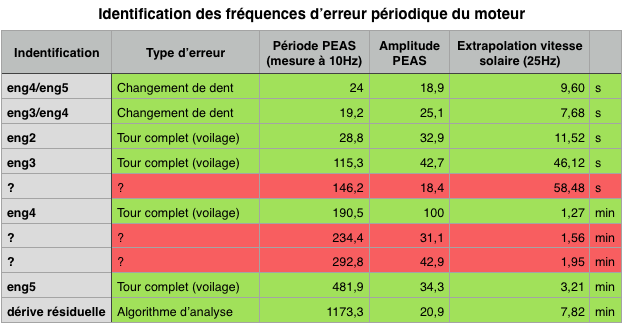
Et là: magie du spectacle. L’analyse de fréquence détecte et supprime toutes les fréquences. L’erreur résiduelle relève de l’encéphalogramme plat… :)

Notre signal mesuré est donc parfaitement reproductible. Cerise sur le gâteau, reprenons la table d’engrenages que j’avais calculé il y a quelques semaines…

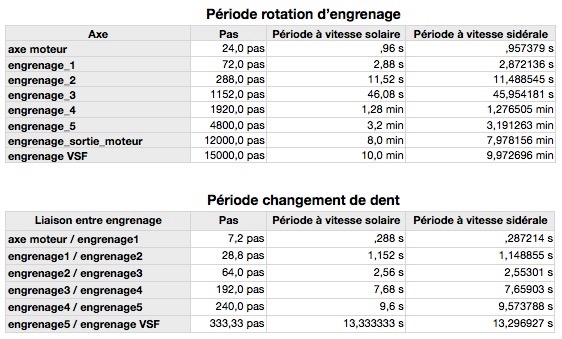
En y regardant de plus près, presque toutes les fréquences proposées par PECPrep sont clairement identifiables à la seconde près par rapport à ma table…
Voilà qui valide on ne peut mieux le concept de l’analyseur!
Dans les faits, l’analyseur va être un outil particulièrement précieux pour la mise au point de l’algorithme de correction d’erreur périodique avec le Arduino. Je pourrais ainsi contrôler la qualité du correcteur sur des données réelles sans sortir de chez moi. :D
Idéalement, il serait même intéressant de pouvoir faire cela en temps réel et non sur une séquence vidéo enregistrée. A méditer pour les prochaines nuits blanches…
Dans le colimateur de l'analyseur...

Encore quelques détails à améliorer mais cela valide l’analyseur de précision. Le concept fonctionne pas mal. Dommage que le 5D Mk III monte très vite en température et génère un bruit de lecture marqué même à 100Iso. Cela limite la précision des mesures. Avec une vraie CCD le principe deviendrait redoutable.
Ebauche d'analyseur de précision de moteur pas à pas
Le moteur et sa mire sont mis en place sur un meuble avec un éclairage…

Dans l’axe à quelques mètres, je mets l’appareil photo en mode vidéo RAW sous Magic Lantern. Je réalise une vidéo sur un peu plus d’un tour complet d’engrenage (période de 8min dans mon cas).

La vidéo RAW MLV est ensuite transférée sur le Mac et convertie en mov sans perte avec le logiciel MLVToMovie que j’ai codé il y a quelques temps pour faire de l’imagerie planétaire.
Reste à analyser la vidéo. J’ai travaillé aujourd’hui sur le suivi des « étoiles noires «. - Ouha!!! Ca claque dit comme ça!!! :D - Il reste à extrapoler les données pour déterminer la vitesse de rotation à un instant t.
L’ébauche du logiciel en action avec incrustation en « presque » réalité augmentée…
La suite au prochain épisode. Je vais faire dormir un peu les neurones pour ce soir.
Platine de test de précision de moteur pas à pas

Voici le résultat...


Le concept est totalement inspiré d’une expérience menée par DBlatte (Christophe), pour caractériser la précision de ses moteurs pas à pas, et présentée sur le forum d’astrosurf…
De la précision des moteurs pas à pas
Reste à y coller une mire d’étoiles, mettre en place un setup de prise de vue et le traitement des données qui va bien derrière. :)
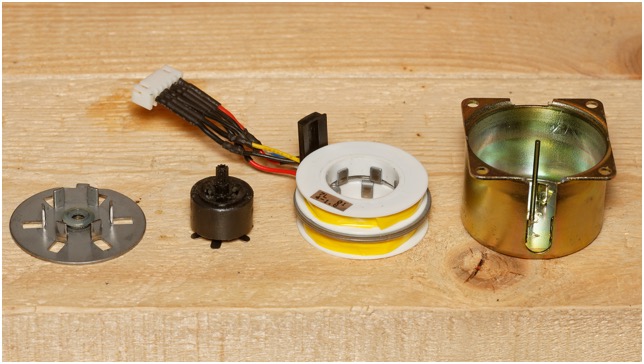
Moteur P43GH démonté
De gauche à droite: le couvercle du carter, le moyeu avec son aimant permanent, les deux bobines de cuivre, le carter du bloc moteur avec son axe pour accueillir le moyeu...
Le moteur entièrement clos avec sa démultiplication. Un léger coup de Dremel a été nécessaire pour désolidariser les pattes de la démultiplication…

Démultiplication retirée. On aperçoit le capot du carter…

Retrait du capot. Au milieu, le moyeu en place. C'est en fait un simple aimant qui va tourner en fonction des phases.

Moyeu retiré. On aperçoit 6 petites ailettes qui servent de "ressort" et évitent ainsi que le moyeu ne frotte sur le fond du carter lorsqu'il tourne...

Et voici les petites plaques en métal des phases du moteur. C'est elles qui vont se polariser lorsque le courant passe dans les bobines (parties blanches)…

Sur le principe, cela fonctionne comme ceci…

Moteur a six pas et quatre phases soit 24 pas complets (Source: wikipedia).
Bilan: tout est en parfait état côté moteur. Reste à voir si je peux lui faire une attelle avec un nouvel engrenage en impression 3D pour la pièce cassée de la démultiplication pour le rendre à nouveau opérationnel.

Démultiplication motorisation EM10 USD (suite)

Je constate que cette sous période est confirmée par des mesures de Christophe Demeautis avec une autre EM10 USD sur son site. Ce serait donc un phénomène récurrent avec le modèle USD...

La périodicité est un indice important. Une telle période est incompatible avec les engrenages externes (pignons moteur et pignon roue dentée) car elle est bien trop rapide. Il faut donc s’y coller côté démultiplication.
Partie un peu fastidieuse: le comptage des dents de chaque engrenage et des arbres. Pour me simplifier la tâche, j’ai opté pour de la photo macro de chaque engrenage. Voici un photo montage (engrenage masqués ajoutés en transparence) avec le comptage des dents…
Calcul de contrôle avec le logiciel Soulver pour 500 rotations (logiciel très pratique pour poser ce genre de calculs):
rotation_engrenage_moteur = 500 // 500 rotations
// Mouvement de dents
engrenage_moteur = rotation_engrenage_moteur × 10 // = 5 000 dents
engrenage_1 = engrenage_moteur/30 × 10 // = 1 666,6666666667 dents
engrenage_2 = engrenage_1/40 × 10 // = 416,6666666667 dents
engrenage_3 = engrenage_2/40 × 18 // = 187,5 dents
engrenage_4 = engrenage_3/30 × 10 // = 62,5 dents
engrenage_5 = engrenage_4/25 × 20 // = 50 dents
// Rotations des engrenages
rotation_engrenage_1 = engrenage_moteur/30 // = 166,6666666667 rotations
rotation_engrenage_2 = engrenage_1/40 // = 41,6666666667 rotations
rotation_engrenage_3 = engrenage_2/40 // = 10,4166666667 rotations
rotation_engrenage_4 = engrenage_3/30 // = 6,25 rotations
rotation_engrenage_5 = engrenage_4/25 // = 2,5 rotations
rotation_engrenage_6 = engrenage_5/50 // = 1 rotation
L’arbre moteur doit donc bien faire 500 tours pour un seul tour en sortie soit une démultiplication de 1/500. On est bon par rapport aux spécifications constructeur.
Reste à déterminer la périodicité de chaque engrenage pour recoupement avec l’erreur périodique de la monture. Il faut alors extrapoler sur 10min (période complète de la vis sans fin à vitesse solaire de référence). Avant toute chose, il nous faut le nombre de pas effectués en 10min soit: 25Hz*60*10 = 15 000 pas. Etant donné que nous somme en vitesse sidérale pour les mesures d’EP, le nombre de pas est en fait un peu plus élevé si l’on veut être précis: 15 041,068733 soit un ratio de 1,002738 que nous appliqueront en fin de calcul.
pas = 15000 // 15000 pas pour un tour de vis sans fin (si tout va bien ;) )
pas_moteur = 24 // Nombre de pas du moteur pour un tour complet
rotation_engrenage_moteur = pas/pas_moteur // = 625 rotations
// Mouvement de dents
engrenage_moteur = rotation_engrenage_moteur × 10 // = 6 250 dents
engrenage_1 = engrenage_moteur/30 × 10 // = 2 083,3333333333 dents
engrenage_2 = engrenage_1/40 × 10 // = 520,8333333333 dents
engrenage_3 = engrenage_2/40 × 18 // = 234,375 dents
engrenage_4 = engrenage_3/30 × 10 // = 78,125 dents
engrenage_5 = engrenage_4/25 × 20 // = 62,5 dents
engrenage_sortie_moteur = engrenage_5/50 × 36 // 45 dents
// Rotations des engrenages
rotation_engrenage_1 = engrenage_moteur/30 // = 208,3333333333 rotations
rotation_engrenage_2 = engrenage_1/40 // = 52,0833333333 rotations
rotation_engrenage_3 = engrenage_2/40 // = 13,0208333333 rotations
rotation_engrenage_4 = engrenage_3/30 // = 7,8125 rotations
rotation_engrenage_5 = engrenage_4/25 // = 3,125 rotations
rotation_engrenage_6 = engrenage_5/50 // = 1,25 rotations
rotation_vis_sans_fin = rotation_engrenage_6 × 36/45 // = 1 rotation de la vis sans fin (Oufff!!! On est bon!)
Nous voici à l’heure du bilan. Avec 7,8125 rotations (soit 7,83389 rotations rapporté à la vitesse sidérale) notre coupable semble tout indiqué: c’est l’engrenage 4 le fautif (gear_4 sur la photo) à la jonction entre engrenage alliage et engrenage plastique. La bonne nouvelle, c’est que nous avons maintenant une connaissance très précise de la sous période: 10 min / 7,8125 rotations / 1,002738=1,276506min. La moins bonne, c’est que cette erreur n’est pas sous multiple de l’erreur périodique principale ce qui va la rendre plus délicate à intégrer dans la correction PEC. Mais dans notre malheur, il y a une bonne chose à y regarder de plus près: 15000/7,8125 = 1920 pas. En d’autres termes: la sous période se reproduit tous les 1920 pas entiers.
Pour terminer, voici l’extrapolation de toutes les périodes incluant rotation complète des engrenages (effet potentiel de voilage) et les changements de dents (effet potentiel d’erreur d’usinage des dents)…
Veni, vidi, vici pour cette étape. :D
Démultiplication motorisation EM10 USD
Qu’à cela ne tienne! Je me suis mis en quête d’un moteur hors service d’EM10 USD sur les forums astro. Et pour mon plus grand plaisir, Rémi Petitdemange d’Optique Unterlinden (importateur de la marque Takahashi) a répondu présent et m’a envoyé gracieusement un moteur pour étude. Un big big merci Rémi! ;)
Dès réception, la dissection a donc commencé…

Il y a plus qu’à compter tout ça et voir ce qu’il en ressort…

Affaire à suivre.