


avr. 2017
Début de prototypage de la partie puissance
27/04/2017 10:35 Rangé dans:Electronique
Les choses se précisent côté puissance pour l’alimentation des moteurs. La nouvelle façade devrait à terme être assez minimaliste. On voit ici le pcb du prototype...
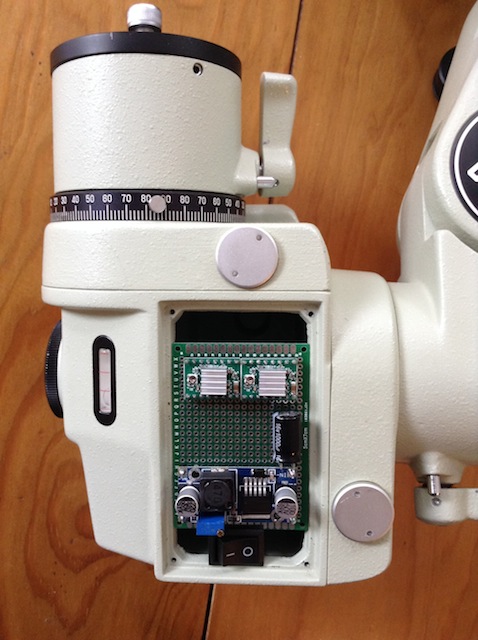
A terme les composants seront positionnés vers l’intérieur de la monture pour minimiser l’épaisseur de la façade.
Pour l’instant tout n’y est pas encore. En bas nous avons un régulateur (qui va être remplacé par un modèle plus haut de gamme) et le bouton de mise en marche. Au milieu un condensateur pour amortir les pointes de surtension. Et en haut les deux drivers de moteur pas à pas A4988.
D’ailleurs au passage, voici un article très intéressant qui fait la part belle au A4988…
http://hackaday.com/2016/08/29/how-accurate-is-microstepping-really/
Il reste un peu de place sur le pcb pour la led du viseur polaire, un régulateur pour abaisser la tension 12v à 5V pour l’alimentation du Arduino de la raquette de commande, un connecteur vers la raquette. Je me tâte aussi à installer les connectiques ST4 et l’USB directement sur la monture. Cela éviterait les câblages externe sur la raquette. Réflexion à poursuivre… :)
A terme les composants seront positionnés vers l’intérieur de la monture pour minimiser l’épaisseur de la façade.
Pour l’instant tout n’y est pas encore. En bas nous avons un régulateur (qui va être remplacé par un modèle plus haut de gamme) et le bouton de mise en marche. Au milieu un condensateur pour amortir les pointes de surtension. Et en haut les deux drivers de moteur pas à pas A4988.
D’ailleurs au passage, voici un article très intéressant qui fait la part belle au A4988…
http://hackaday.com/2016/08/29/how-accurate-is-microstepping-really/
Il reste un peu de place sur le pcb pour la led du viseur polaire, un régulateur pour abaisser la tension 12v à 5V pour l’alimentation du Arduino de la raquette de commande, un connecteur vers la raquette. Je me tâte aussi à installer les connectiques ST4 et l’USB directement sur la monture. Cela éviterait les câblages externe sur la raquette. Réflexion à poursuivre… :)
Présentation vidéo de l'analyseur logique 24MHz 8CH Saleae...
27/04/2017 08:28 Rangé dans:Actualité
Analyseur logique Saleae à moins de 15€
15/04/2017 22:45 Rangé dans:Electronique
Je ne pensais pas en parler sur le blog mais ce clone à pas cher sur ebay m’a tout simplement bluffé. Alors soyons clair, c’est un clone chinois des premières versions des produits de Saleae Logic d’où un prix canon. A tel point que je me demandais ce que cela valait. Et bien cela marche… et même très bien!

Le clone est parfaitement compatible avec le logiciel proposé par Saleae qui est on ne peut plus simple d’usage. Mon Mac adore et moi tout autant...

Du coup, je me suis amusé à pousser mon Arduino dans ses retranchements juste pour le fun histoire de voir si l’analyseur suivait. Aucun problème, le Arduino décroche bien avant lui. 8Mhz semble sa limite (optimisation max avec suppression du loop et écriture direct sur les ports d’entrées/sorties) soit 0,125us*2 = 0,250us de largeur de période d’impulsion. Largement de quoi faire clignoter une led quoi… Lol

La mesure de gauche (0,25us) montre le rebouclage de la boucle infinie while.
On voit encore mieux en dézoomant: 16 périodes du fait de la redondance de code dans la boucle sur 3,875us puis un trou lié au rebouclage…

Et voici un lien vers le code source pour les curieux…
Je pense que j’en ferais un article détaillé à l’occasion car cela va être un outil précieux pour une calibration optimale de mes moteurs pas à pas par rapport à la vitesse sidérale.
Edit: non en fait on peut encore mieux faire et monter à 8Mhz par période. On en reparle un peu plus tard. :)
Le clone est parfaitement compatible avec le logiciel proposé par Saleae qui est on ne peut plus simple d’usage. Mon Mac adore et moi tout autant...
Du coup, je me suis amusé à pousser mon Arduino dans ses retranchements juste pour le fun histoire de voir si l’analyseur suivait. Aucun problème, le Arduino décroche bien avant lui. 8Mhz semble sa limite (optimisation max avec suppression du loop et écriture direct sur les ports d’entrées/sorties) soit 0,125us*2 = 0,250us de largeur de période d’impulsion. Largement de quoi faire clignoter une led quoi… Lol
La mesure de gauche (0,25us) montre le rebouclage de la boucle infinie while.
On voit encore mieux en dézoomant: 16 périodes du fait de la redondance de code dans la boucle sur 3,875us puis un trou lié au rebouclage…
Et voici un lien vers le code source pour les curieux…

arduino_max_blink.zipJe pense que j’en ferais un article détaillé à l’occasion car cela va être un outil précieux pour une calibration optimale de mes moteurs pas à pas par rapport à la vitesse sidérale.
Edit: non en fait on peut encore mieux faire et monter à 8Mhz par période. On en reparle un peu plus tard. :)
De drôles d'oeufs de pâques
14/04/2017 21:08 Rangé dans:Electronique
Réception des contrôleurs de moteur pas-à-pas A4988… :)

Le fait que les moteurs d’origine soient finalement alimentés en 12v simplifie grandement les choses. Du coup, vu le coût modique, j’ai acheté un lot de cinq (moins de 10€ l’ensemble avec radiateurs inclus). Cela m’en fait deux en plus pour le prototypage et un encore en sus pour par exemple piloter un moteur de mise au point. :)
Lien ebay...
http://www.ebay.fr/itm/252826447862?ul_noapp=true
Le fait que les moteurs d’origine soient finalement alimentés en 12v simplifie grandement les choses. Du coup, vu le coût modique, j’ai acheté un lot de cinq (moins de 10€ l’ensemble avec radiateurs inclus). Cela m’en fait deux en plus pour le prototypage et un encore en sus pour par exemple piloter un moteur de mise au point. :)
Lien ebay...
http://www.ebay.fr/itm/252826447862?ul_noapp=true
Article étude mécanique et électronique de l'EM10 USD
10/04/2017 18:43 Rangé dans:Electronique
Premier jet de l’étude de l’EM-10 d’un point de vue électronique et méca…
http://em10-usd-arduino-takahashi.eliotis.com/etude-em10-takahashi/index.html

http://em10-usd-arduino-takahashi.eliotis.com/etude-em10-takahashi/index.html
Sky Catalog dispo sur mon Github
08/04/2017 23:59 Rangé dans:Algorithme
Et voilà pour Sky Catalog. La librairie C++ est dispo sur mon Github avec encore un joli logo d’illustration pour le plaisir...

Et pour en savoir plus c’est par ici…
http://em10-usd-arduino-takahashi.eliotis.com/librairies-arduino/skycatalog/index.html
Et pour en savoir plus c’est par ici…
http://em10-usd-arduino-takahashi.eliotis.com/librairies-arduino/skycatalog/index.html
Mesures de l'électronique de l'em-10 USD
05/04/2017 19:13 Rangé dans:Electronique
Depuis le temps que cela devait être fait, voici le premier passage à l’oscilloscope de l’électronique d’origine de mon EM10 USD. Pour m’éviter toute fausse manipulation, je me suis entouré du savoir faire d’un ami électronicien de métier. Merci Nicolas! :)
Je reviendrais dans un prochain billet sur le câblage mais première chose importante constatée: les moteurs 1Volt / 2 Ohms sont en fait alimentés en… 12 volts!!!

Voilà qui explique sans doute la phrase d’avertissement dans la documentation d’origine de Takahashi. Je cite:
« Attention: une sollicitation prolongée (plus d’une minute en continu) des déplacements en vitesse rapide 50 X peut endommager le circuit électronique de votre monture. »
Deuxième mesure intéressante, la période des impulsions en vitesse sidérale au niveau d’une bobine du moteur unipolaire en AD est de 6,244Hz.
Le calcul suivant nous permet de déterminer l’erreur résiduelle:
// Mesures
FrequenceBobine = 6,244 Hz
FrequencePas = FrequenceBobine × 4 = 24,976 Hz
// Caractéristiques moteur
NombreDePasMoteur = 24 pas
Demultiplication = 1/500 = 0,002
VitesseMoteur = 60 × FrequencePas / NombreDePasMoteur × Demultiplication = 0,12488 tr/min
// Engrenages intermédiaires
NombreDeDentsEngrenageMoteur = 36 dents
NombreDeDentsEngrenageVisSansFin = 45 dents
DémultiplicaitionEngrenages = NombreDeDentsEngrenageMoteur/NombreDeDentsEngrenageVisSansFin = 0,8
// Vis sans fin
VitesseVisSansFin = VitesseMoteur × DémultiplicaitionEngrenages = 0,099904 tr/min
NombreDeDentsRouteDentéeAD = 144 dents
// Vitesse sidérale monture
PeridodeVitesseSideraleMonture = NombreDeDentsRouteDentéeAD/VitesseVisSansFin = 1 441,38 min
// Vitesse sidérale parfaite : 23h56m04s
PeriodeVitesseSideraleParfaite = 23*60+56 + 4/60 = 1 436,07 min
// Erreur (ratio théorie/pratique)
(1-PeridodeVitesseSideraleMonture/PeriodeVitesseSideraleParfaite) × 100 = -0,37%
A noter que si l'on prend une « vitesse sidérale parfaite » arrondie à 24h, l’erreur résiduelle tombe à -0,096%. Il est donc probable que les ingénieurs de Takahashi se soient simplifiés la tâche à l’époque.
Je reviendrais dans un prochain billet sur le câblage mais première chose importante constatée: les moteurs 1Volt / 2 Ohms sont en fait alimentés en… 12 volts!!!
Voilà qui explique sans doute la phrase d’avertissement dans la documentation d’origine de Takahashi. Je cite:
« Attention: une sollicitation prolongée (plus d’une minute en continu) des déplacements en vitesse rapide 50 X peut endommager le circuit électronique de votre monture. »
Deuxième mesure intéressante, la période des impulsions en vitesse sidérale au niveau d’une bobine du moteur unipolaire en AD est de 6,244Hz.
Le calcul suivant nous permet de déterminer l’erreur résiduelle:
// Mesures
FrequenceBobine = 6,244 Hz
FrequencePas = FrequenceBobine × 4 = 24,976 Hz
// Caractéristiques moteur
NombreDePasMoteur = 24 pas
Demultiplication = 1/500 = 0,002
VitesseMoteur = 60 × FrequencePas / NombreDePasMoteur × Demultiplication = 0,12488 tr/min
// Engrenages intermédiaires
NombreDeDentsEngrenageMoteur = 36 dents
NombreDeDentsEngrenageVisSansFin = 45 dents
DémultiplicaitionEngrenages = NombreDeDentsEngrenageMoteur/NombreDeDentsEngrenageVisSansFin = 0,8
// Vis sans fin
VitesseVisSansFin = VitesseMoteur × DémultiplicaitionEngrenages = 0,099904 tr/min
NombreDeDentsRouteDentéeAD = 144 dents
// Vitesse sidérale monture
PeridodeVitesseSideraleMonture = NombreDeDentsRouteDentéeAD/VitesseVisSansFin = 1 441,38 min
// Vitesse sidérale parfaite : 23h56m04s
PeriodeVitesseSideraleParfaite = 23*60+56 + 4/60 = 1 436,07 min
// Erreur (ratio théorie/pratique)
(1-PeridodeVitesseSideraleMonture/PeriodeVitesseSideraleParfaite) × 100 = -0,37%
A noter que si l'on prend une « vitesse sidérale parfaite » arrondie à 24h, l’erreur résiduelle tombe à -0,096%. Il est donc probable que les ingénieurs de Takahashi se soient simplifiés la tâche à l’époque.
Régulateur Foxnovo HOBBYWING 3A UBEC 5V
03/04/2017 10:55 Rangé dans:Electronique
Le Arduino supportant une tension Max de 9v, un régulateur sera nécessaire pour le câblage sur batterie 12v. La consommation des moteurs étant relativement limitée (2,32A max avec les deux moteurs à pleine vitesse et l’électronique d’origine), j’ai opté pour un régulateur UBEC 3 Ampères (Foxnovo HOBBYWING 3A UBEC 5V) à 6€ sur Amazon. Cela devrait être suffisant pour l’ensemble…

Nouvelle librairie SkyCatalog en cours de dev
02/04/2017 21:05 Rangé dans:Divers
Ce weekend, c’était bdd (base de données) party!!! But du jeu: créer une base de fichiers sur carte SD pour servir de pseudo base de données d’objets célestes (étoiles, Messier, NGC, IC). Faute de trouver des bases de données homogènes et cohérentes en accès libre sur le web, j’ai opté pour le logiciel Coelix qui permet d’exporter ses données. Simple et efficace, je le recommande vivement.
Une fois les fichiers d’export générés, j’ai ensuite traité les données pour les transformer en une arborescence de fichiers et ne conserver que les données utiles. Ce travail devrait donner lieu à une nouvelle librairie Arduino baptisée SkyCatalog et complétant Ephemeris.

Une fois les fichiers d’export générés, j’ai ensuite traité les données pour les transformer en une arborescence de fichiers et ne conserver que les données utiles. Ce travail devrait donner lieu à une nouvelle librairie Arduino baptisée SkyCatalog et complétant Ephemeris.