Electronic Polar Scope (suite)

Ma modélisation est dérivée du modèle de mynameishamish sur thingiverse et modifiée afin de pouvoir fixer le boitier à la monture...


Le prototype est maintenant opérationnel pour le développement logiciel. :)
Adapateur monture CS pour caméra Raspberry PI
https://fr.aliexpress.com/item/Raspberry-Pi-Camera-better-than-the-original-one-HD-5-megapixel-OV5647-sensor-adjustable-focus-for/32683743922.html?spm=a2g0s.9042311.0.0.8a956c37Ta1GXg

L’intérêt? Et bien les capteurs avec monture CS sont plus chers. Une fois l’adaptateur réalisé, on peut par exemple utiliser cet objectif 25mm F/1.2 à moins de 7€ frais de port inclus...
1/3 "25mm CCTV Objectif vue 70 m 11 degrés F1.2 IR Fixe Iris CS Mont pour CCD de Sécurité caméra

L’objectif ce visse directement sur l’adaptateur...

L’adaptateur est équipé d’un coffrage du capteur pour l’isoler au mieux des lumières parasites (j’ai ensuite peint l’intérieur en noir mat bien évidement)...
On peut réutiliser les deux vis de l’objectif d’origine pour fixer le capteur et solidariser le pied de test...

Le passage de la nappe peut être placé en haut comme ici (le capteur est tête en bas) ou bien en bas (la nappe se glisse alors par le pied)...

L’ensemble a été pensé pour une impression zéro support...

Quel lien avec mon projet me direz vous? Et bien je réfléchi tranquillement à réaliser un viseur polaire numérique intégré à l’EM-10 avec un Raspberry PI Zéro et le tout à moindre frais (<50€). ;)
Le modèle 3D est dispo sur mon compte thingiverse...
https://www.thingiverse.com/thing:3277107
Enjoy folks!!!
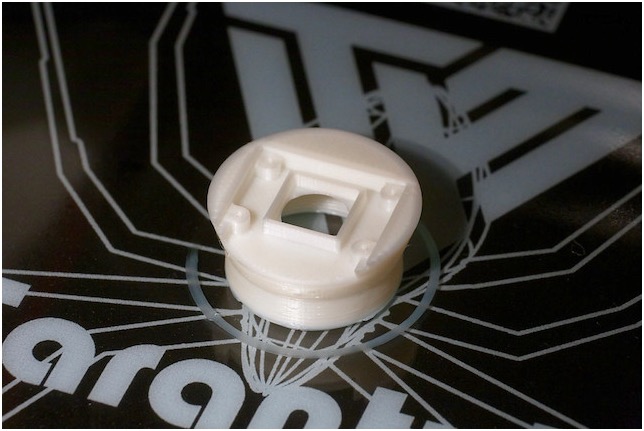
Motorisation de la molette de mise au point du CN-212
- ne pas toucher au tube: le système ne doit nécessiter aucun perçage.
- facile à monter/démonter en quelques secondes et sans outils dans le noir en cas de besoin.
- on doit pouvoir continuer à utiliser la molette en manuel.
- cela ne doit pas dénaturer le télescope. :)
On mélange tout ça avec OpenSCAD et -quelques prototypes plus tard- abracadabra...

Le concept est simple. La platine est solidarisée via le porte oculaire. Et un manchon, ajouré pour accueillir l’axe moteur, vient s’enficher sur la molette de mise au point.
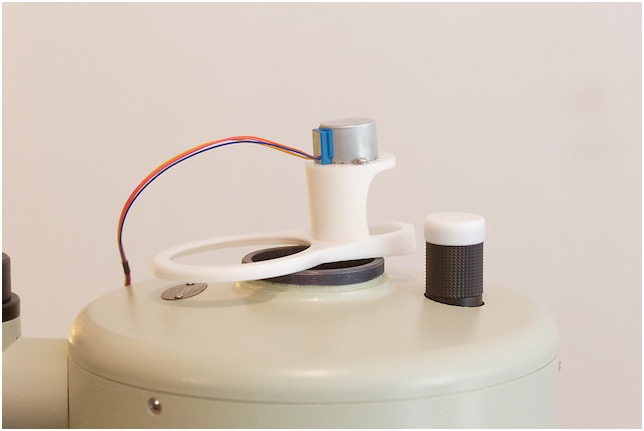
Le tour est joué...


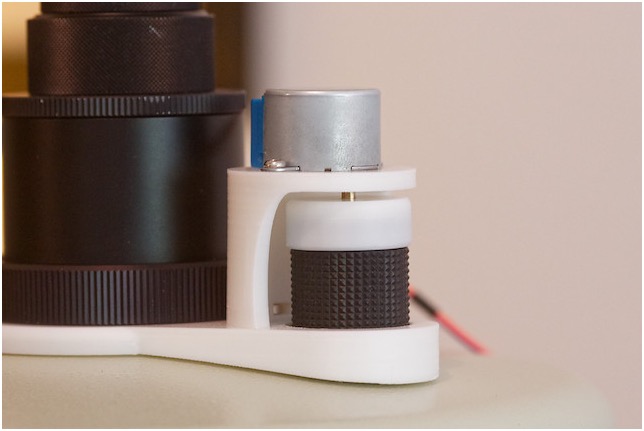
Voilà qui devrait être parfait pour boucler la boucle en complément du contrôle de la monture.
Premier prototype de boitier côté moteurs
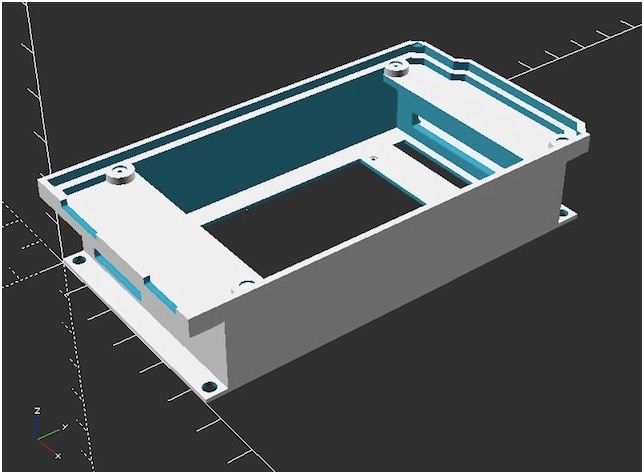
Installé en lieu et place de l’ancien boitier de commande Takahashi, il intègre à l’intérieur l’électronique de puissance et en façade un support destiné à accueillir ensuite un Arduino Mega…
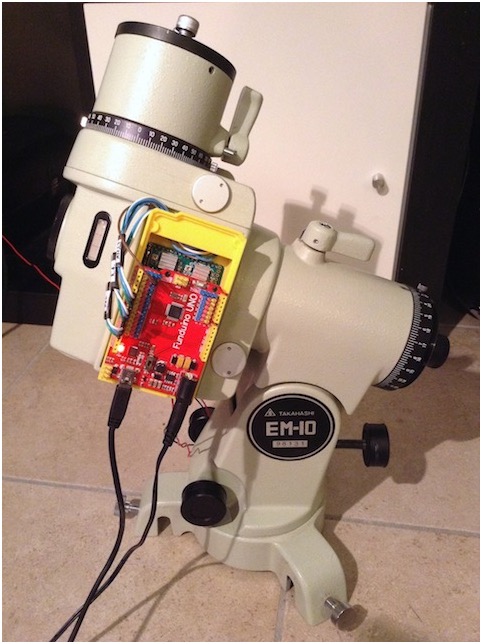
Pour l’instant j’utilise un modèle Uno avec réplication des ports pour me faciliter la connexion avec l’analyseur logique Saelae (non présent sur les photos).

Niveau Arduino, c’est dans l’immédiat très light avec le câblage du moteur d’ascension droite (Step, Direction, Enable) ainsi que du moteur de déclinaison (Step, Direction, Enable) et pour finir le câblage du microstepping (MS1, MS2, MS3) afin de gérer la résolution du microstepping à la volée pour les tests.

Derrière le Uno, à l’intérieur du boitier, on aperçoit la platine de puissance présentée précédemment.
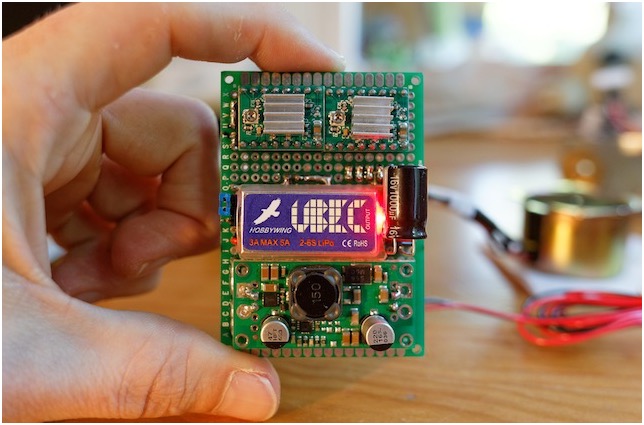
Cablage de l'electronique de puissance de l'EM-10 Taka.
Cablage de l'electronique de puissance de l'EM-10 Taka (suite).
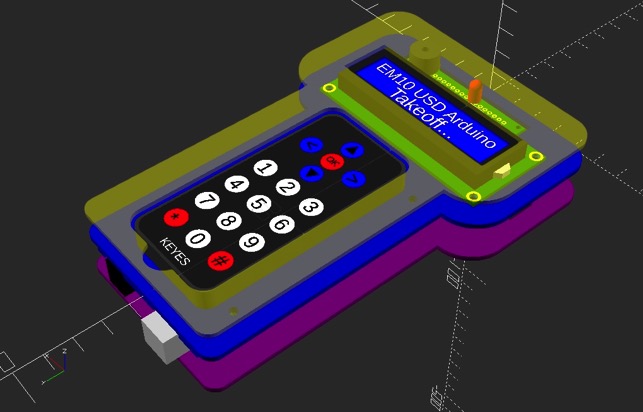

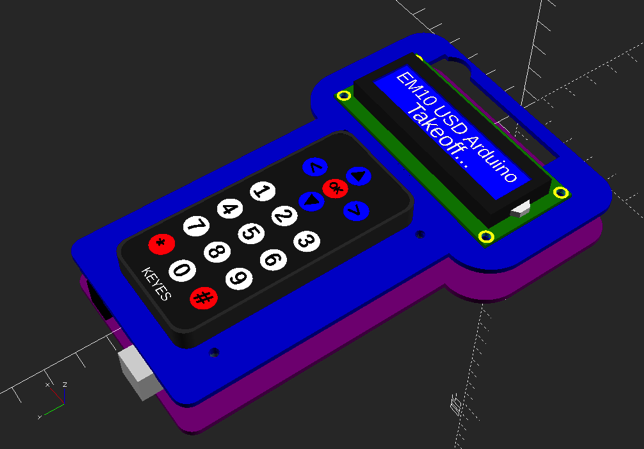
Modélisation 3D de la télécommande infra rouge
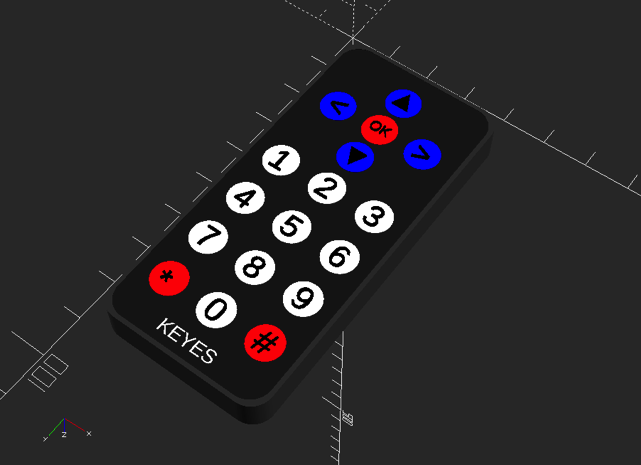
Dans mon esprit, l’idée serait de l’intégrer à une plus grosse raquette de commande câblée au télescope et contenant le Arduino et un afficheur LCD. On pourrait ainsi l’utiliser dans son compartiment ou bien la détacher pour piloter manuellement le télescope à distance...

Chaque pièce est mesurée précisément à l’aide d’un pied à coulisse pour coller au plus prêt de la réalité. Voici l’afficheur LCD modélisé…

Et son intégration de la raquette. On peut même paramètrer le texte affiché! :)