


Cablage de l'electronique de puissance de l'EM-10 Taka (suite)
23/05/2017 22:14 Rangé dans:Electronique
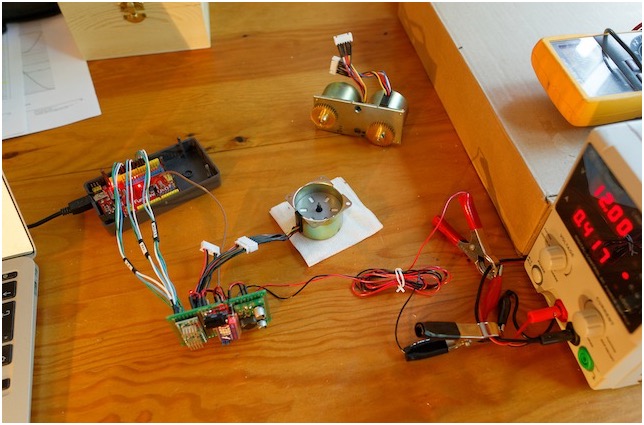
Le prototype de la partie puissance est opérationnel. Je vais maintenant pouvoir attaquer les choses sérieuses avec les moteurs.
Pour les premiers tests, j’ai utilisé le moteur avec la démultiplication hors service et une alimentation stabilisée. Comme ça aucun risque. L’ensemble est pour l’instant piloté avec un Arduino Uno…
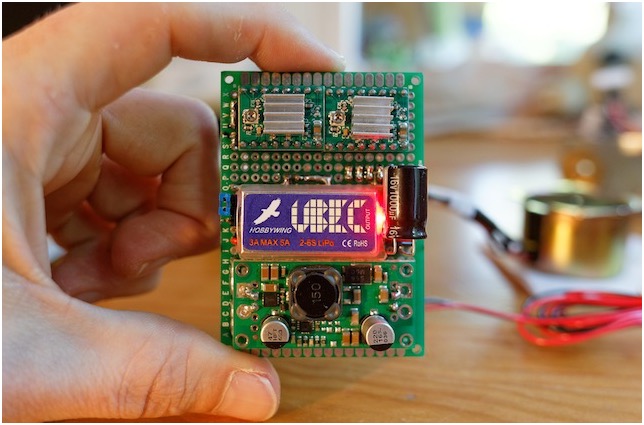
D’un point de vue électronique, rien de bien sorcier sur la platine: en bas un régulateur 12V pour alimenter les moteurs en puissance, un condensateur pour absorber les pics de tension lors des démarrages, un second régulateur UBEC pour l’alimentation 5v de la partie logique et enfin en haut avec leur radiateur les deux drivers A4988…
Vue arrière avec câblage, une led pour l’éclairage du viseur polaire et un potentiomètre de réglage...
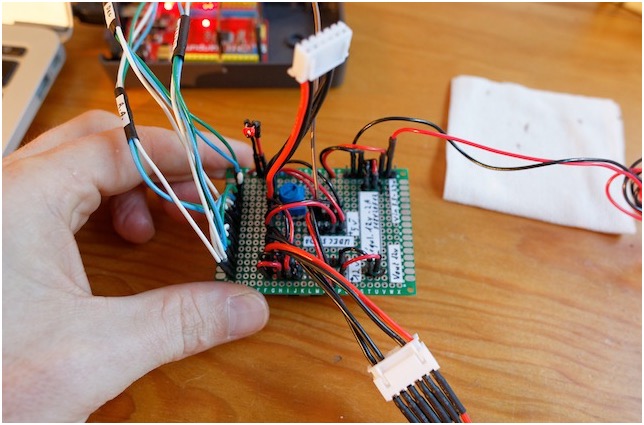
Cela peut paraitre un peu touffu car j’ai aussi câblé le microstepping pour une gestion logicielle en temps réel ainsi que l’activation/désactivation des drivers (Enable) pour limiter la conso lorsque les moteurs seront à l’arrêt mais rien de bien sorcier dans les faits...

Pour les premiers tests, j’ai utilisé le moteur avec la démultiplication hors service et une alimentation stabilisée. Comme ça aucun risque. L’ensemble est pour l’instant piloté avec un Arduino Uno…
D’un point de vue électronique, rien de bien sorcier sur la platine: en bas un régulateur 12V pour alimenter les moteurs en puissance, un condensateur pour absorber les pics de tension lors des démarrages, un second régulateur UBEC pour l’alimentation 5v de la partie logique et enfin en haut avec leur radiateur les deux drivers A4988…
Vue arrière avec câblage, une led pour l’éclairage du viseur polaire et un potentiomètre de réglage...
Cela peut paraitre un peu touffu car j’ai aussi câblé le microstepping pour une gestion logicielle en temps réel ainsi que l’activation/désactivation des drivers (Enable) pour limiter la conso lorsque les moteurs seront à l’arrêt mais rien de bien sorcier dans les faits...