


Canon EF 400mm F/5.6: mini planet killer... ;)

En fait de lunette astronomique, j’ai réalisé des adaptations en impression 3D me permettant d’y loger une barlow Powermate 3x et 5x...
https://www.thingiverse.com/thing:4562984
Le téléobjectif est lui même fixé via une embase d’adaptation (impression 3D en PETG) entre l’EM-10 et le collier pas Kodak...


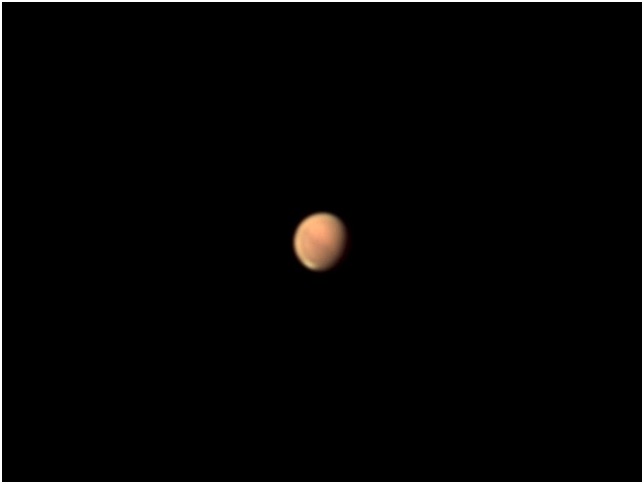
Dès lors on dispose d’assez de tirage pour y monter oculaire et renvoi coudé. Il est également possible de faire de l’imagerie planétaire grâce à une focale résultante de respectivement 1200mm et 2000mm de focale. Et voici le résultat avec une AZI 290MC...



L’imagerie Lunaire n’est pas en reste avec la possibilité de réaliser des mosaïques intéressantes...

L’imagerie en ciel profond reste tout aussi accessible directement au foyer via un adaptateur ASI/Canon créé sur mesure là aussi en impression 3D...

https://www.thingiverse.com/thing:4307480

>>>Version plus grande ici<<<
Et pour finir Neowise, avec en lieu et place de l’ASI, mon Canon 5D MkIII pour un plus grand champ photographique...

Bref, de quoi se faire plaisir de 400mm à 2000mm de focale. :)
Masque anti aigrettes pour le CN-212
Alors l’œil à l'oculaire disparaitre tu les verras.
Newton ou lunette visuellement plus tu ne sauras.
Quoi suis-je?
Le masque anti aigrettes!
La manip est inspirée de l'article de Serge Bertorello:
http://serge.bertorello.free.fr/antiaigr/antiaigr.html
Et hop! Directement du concepteur au consommateur...
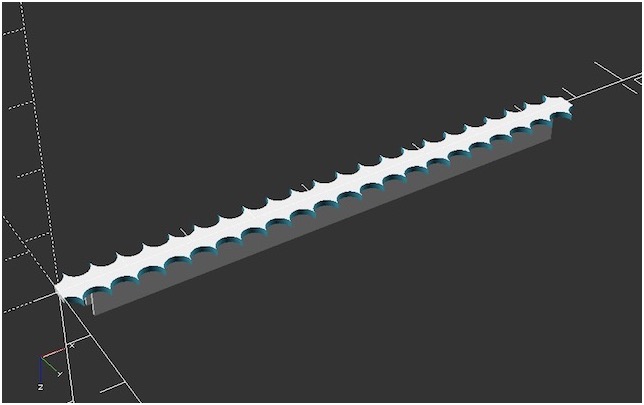



Plus qu’à tester sur le ciel. :)
Edit: résultat en demi teinte pour cette première version. Les aigrettes disparaissent bien mais au profit d'une « boule à facettes » pas forcément très esthétique...

Saturne et Mars au CN-212


CN-212 à F/D 12,4 + Barlow 2x + 5D MKIII. Shoot en mode vidéo RAW Magic Lantern et zoom 3x. Traitement avec MLVToMovie, AS2 et Registax 6.
D’ailleurs pour rappel, si vous êtes sur Mac, sachez que j’ai mis à dispo des versions Mac d’AS2, Registax 6 et même Iris...
http://mlvtomov.eliotis.com/goodies/index.html
MKS MINI sous les étoiles


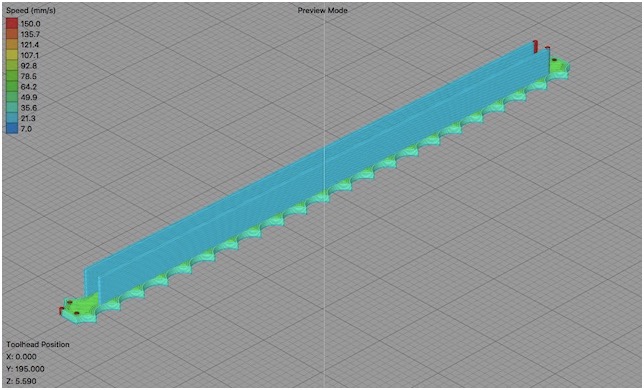
Aperçu de la courbe d’accélération de type sinusoïdale...

Comme le montre le graphique, on obtient un démarrage et un arrêt très doux offrant un bon amortissement de l’inertie du télescope. Pour plus d’infos, voir cet ancien billet: Accélération/décélération: Sinus or not Sinus?
MKS MINI aux commandes...
https://www.youtube.com/watch?v=ckrY5U3mfkkLe projet a bien évolué depuis ses débuts. Simplifions, simplifions, simplifions! Reste à intégrer une led d’éclairage pour le viseur polaire, prévoir une connectique pour le câble de la motorisation de la mise au point et ajouter la deuxième connectique DB-9 pour la future télécommande tactile. A partir de là on sera pas mal niveau matériel côté monture.

Test motorisation mise au point du CN-212
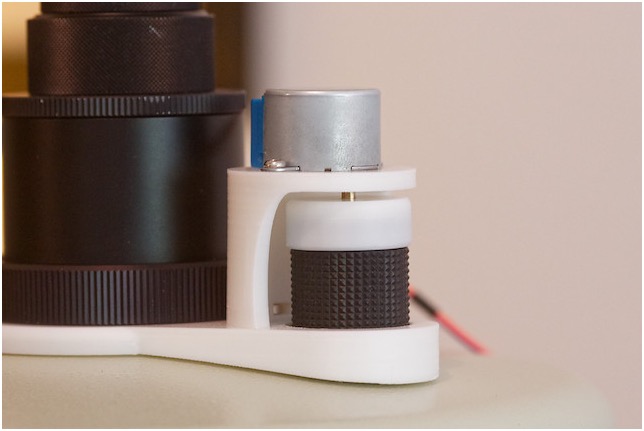
Motorisation de la molette de mise au point du CN-212
- ne pas toucher au tube: le système ne doit nécessiter aucun perçage.
- facile à monter/démonter en quelques secondes et sans outils dans le noir en cas de besoin.
- on doit pouvoir continuer à utiliser la molette en manuel.
- cela ne doit pas dénaturer le télescope. :)
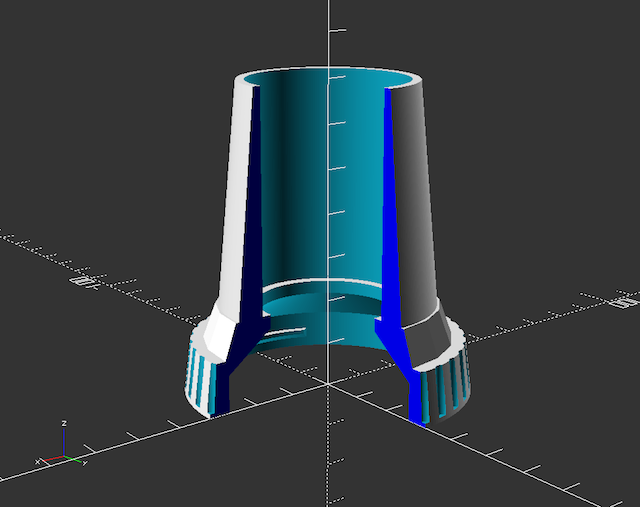
On mélange tout ça avec OpenSCAD et -quelques prototypes plus tard- abracadabra...

Le concept est simple. La platine est solidarisée via le porte oculaire. Et un manchon, ajouré pour accueillir l’axe moteur, vient s’enficher sur la molette de mise au point.
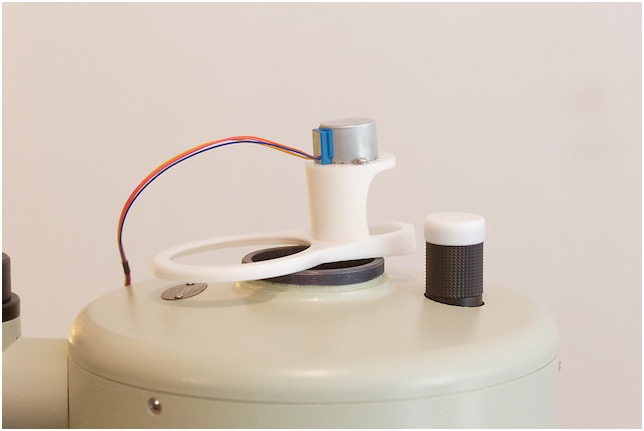
Le tour est joué...


Voilà qui devrait être parfait pour boucler la boucle en complément du contrôle de la monture.
C'est reparti... :)
Donc on récapitule:
- revoir l’électronique de la monture pour qu’elle soit plus simple à concevoir et pourquoi pas encore moins chère?
- déporter l’écran dans une raquette déportée.
- prévoir de piloter la mise au point.
Ok on en est donc là ou presque puisque j’ai déjà avancé sur la question vous vous en doutez. :) Concernant l’électronique, je pense avoir trouvé mon bonheur avec une carte pour imprimante 3D que je vais hacker pour mon usage: la MKS Mini V2.0 Makerbase.

Elle a tout pour me plaire:
- basée sur un Arduino MEGA dans la continuité de mon projet.
- dimensions relativement compactes.
- 4 drivers 4988 afin de piloter à la fois les deux moteurs pas à pas du télescope et potentiellement deux autres périphériques.
- technologie éprouvée puisque dérivée de la Mks standard équipant nombre d’imprimantes 3D DIY.
- tout petit prix: à peine plus de 20€ avec les frais de port sur aliexpress.com.
Il n’en fallait pas plus pour me lancer sur cette piste!
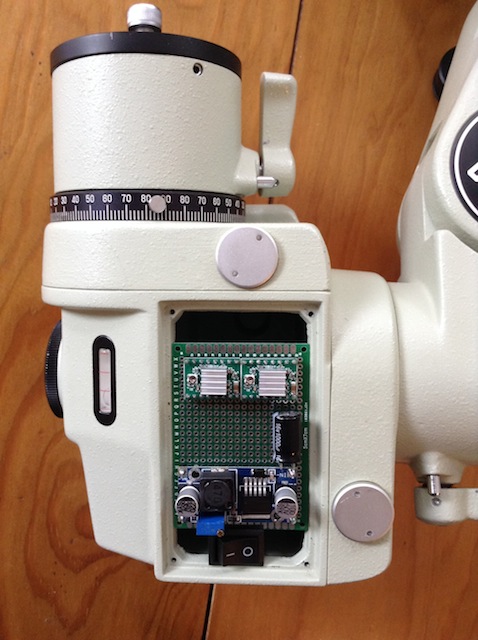
Je vous présente donc mon nouveau prototype déjà installé en bonne place sur ma monture (merci l’impression 3D)... :)
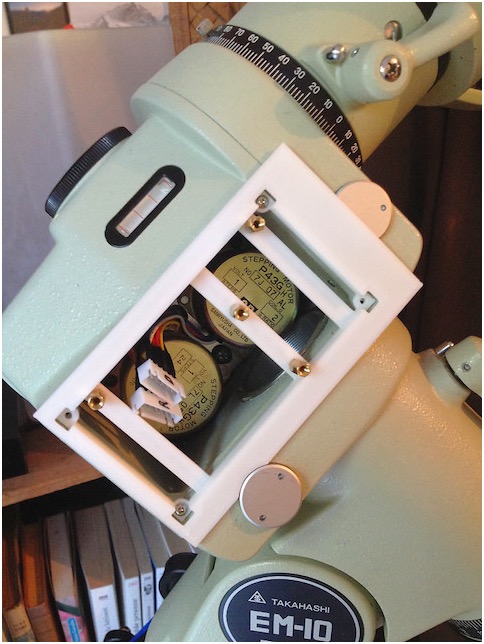
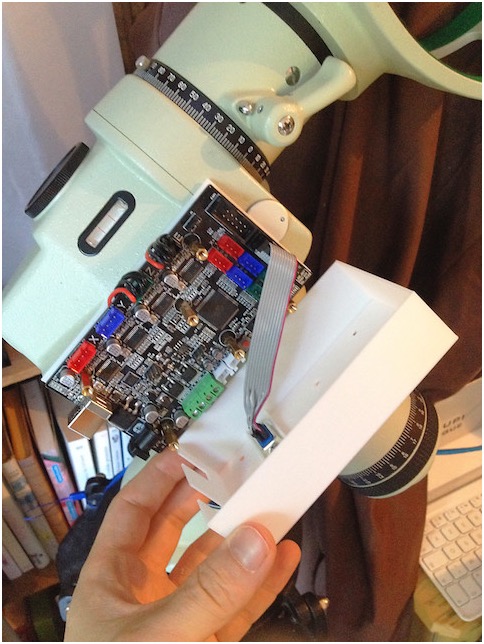

La manette SEGA a été conservée et j’ai prévu un second port DB9 pour la raquette de contrôle qui exploitera l’ancienne carte Arduino équipée de l’écran tactile. Ce dernier s’occupera de l’intelligence (base de donnée, GPS, GOTO, abaque polaire) et la carte Mks s’occupera des moteurs et du PEC.
Carte postale étoilée depuis le col de Gleize


Platine d'adaptation EM10/trépied Meade



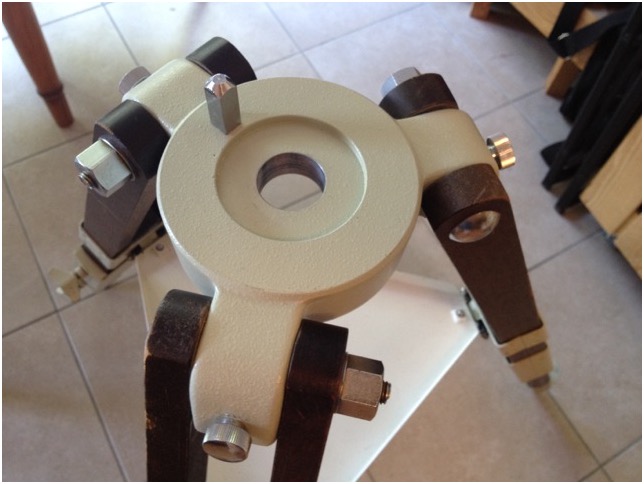

A partir de là, le modèle 3D a été réalisé par mes soins sous OpenSCAD en prenant les cotations au pied à coulisse sur la monture et le trépied…

Puis la fabrication a été laissée au bon soin d’un ami disposant d’une imprimante 3D (25h d’impression tout de même! Merci Richard! :) )…

Avancement de l’impression...

Et voici la platine finale mise en place sur le trépied Meade...

Installation de la monture: comme papa dans maman… :)


Pas de doute, ça a de la gueule… :)

Reste à prévoir la tige filetée de remplacement de l’écarteur d’origine. Elle viendra solidariser la monture avec le trépied en passant par le trou central du dessous.
Si cette platine vous intéresse, j’ai mis le STL à disposition sur thingiverse.com…
>>>> Adapter for Takahashi Mount with Meade Field Tripod <<<<
Un nouveau pied, c'est le pied!

Merci au passage à mon copain Fabrice qui m’en a fait cadeau! Un trépied massif flambant neuf dans son emballage cela ne se refuse pas! :D
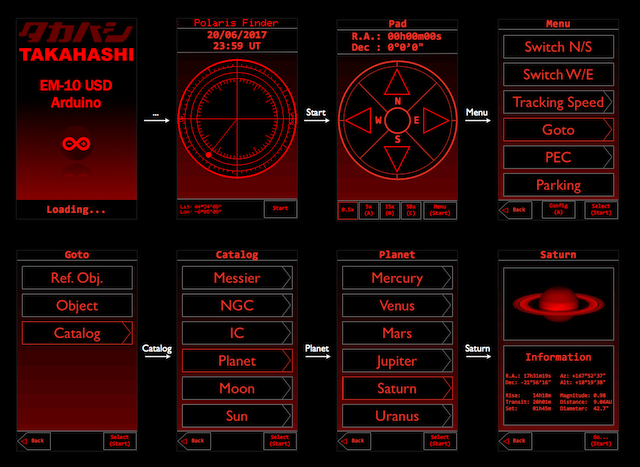
Premier ciel pour l'EM-10 Arduino Takahashi


Mise en place des moteurs au fond du logement de la monture...

Le prototype à l’oeuvre sous les étoiles...



Le bon vieux CN-212 semble apprécier son nouvel habit lumière… ;)

En prime une vidéo de démonstration…
https://www.youtube.com/watch?v=LHpEZYp4NEY
La monture prend vie...
Voici les premières captures officielles…


Et une mini vidéo…
https://www.youtube.com/watch?v=h8L5rXhS2R0
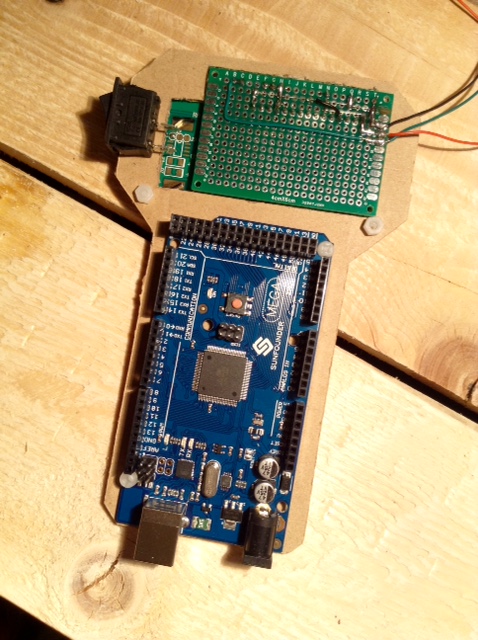
La maquette de travail ressemble à ceci...
Avancée du cablage du proto V1...
- perçage de quelques trous dans le support afin de passer des serre-câbles et fixer le câble de la manette.
- fixation du Arduino avec des visseries qui vont bien.
- coup de cutter sur l’Arduino Mega afin de couper la liaison vers le polyfuse (alimentation 5v) de l’entrée USB.
- repiquage de l’alimentation 5v sur le régulateur UBEC du circuit de puissance.
- câblage d’un interrupteur marche/arrêt.
Pour le proto, je préfère garder un cordon d’alimentation et le repiquer sur le régulateur 5v plutôt que de câbler le arduino directement dessus. Je peux ainsi travailler sur le Arduino en le branchant à une simple alim 5v (vu qu’il n’y a plus d’alimentation par USB) sans alimenter les moteurs lorsque ce n’est pas nécessaire aux développements.



Installation d'un Arduino Mega et d'un LCD


Sega c'est plus fort que Taka...

Pour les amateurs du genre, le code est dispo sur mon github. Plus de détails ici…
Cablage de l'electronique de puissance de l'EM-10 Taka (suite)
Pour les premiers tests, j’ai utilisé le moteur avec la démultiplication hors service et une alimentation stabilisée. Comme ça aucun risque. L’ensemble est pour l’instant piloté avec un Arduino Uno…
D’un point de vue électronique, rien de bien sorcier sur la platine: en bas un régulateur 12V pour alimenter les moteurs en puissance, un condensateur pour absorber les pics de tension lors des démarrages, un second régulateur UBEC pour l’alimentation 5v de la partie logique et enfin en haut avec leur radiateur les deux drivers A4988…
Vue arrière avec câblage, une led pour l’éclairage du viseur polaire et un potentiomètre de réglage...
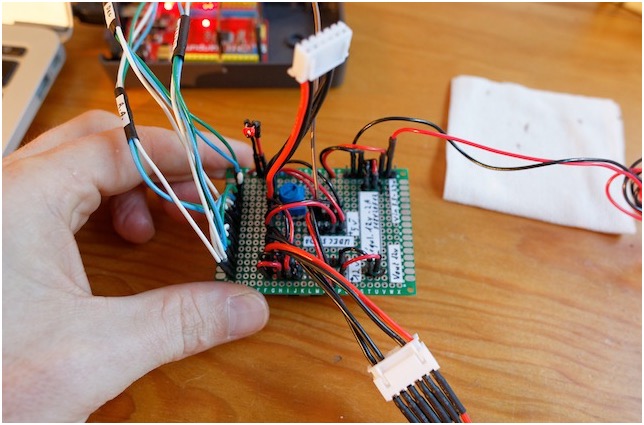
Cela peut paraitre un peu touffu car j’ai aussi câblé le microstepping pour une gestion logicielle en temps réel ainsi que l’activation/désactivation des drivers (Enable) pour limiter la conso lorsque les moteurs seront à l’arrêt mais rien de bien sorcier dans les faits...

Cablage de l'electronique de puissance de l'EM-10 Taka


Premier test d’un des drivers A 4988 en ascension droite. Rien ne crame… C’est bon signe… ;)
Le temps de mettre tout ça en forme et un article détaillé va venir sur les calculs pour la calibration des drivers avec les moteurs pas à pas d’origine.
Réglage de drivers A4988 StepStick
http://reprap.org/wiki/StepStick
Voici les formules:
Imax = Vref/(8*Rcs) ou reformulé pour Vref: Vref = 8*Imax*Rcs
Avec:
- Vref: tension de référence du potentiomètre.
- Imax: tension maximale globale.
- Rcs: résistance de référence = 0,2 ohm pour les StepStick.
L’intensité max (par bobine) en fullstep peut être calculée par la formule:
Imax = √( (I bobine1)^2 + (I bobine2)^2 )
Comme l’intensité est la même dans les deux bobines:
Imax = √( (I bobine)^2 + (I bobine)^2 )
Imax = √( 2*(I bobine)^2 )
Imax = √2 * I bobine
Imax = 1,4142 * I bobine
En d’autres termes et pour faire simple: en fullstep les bobines sont alimentés à 70% seulement. Cela est dû au fait que le driver n’a pas de mode fullstep dédié. Il se cale simplement sur sa table de microstepping. Un graphique parle plus que de longs discours…
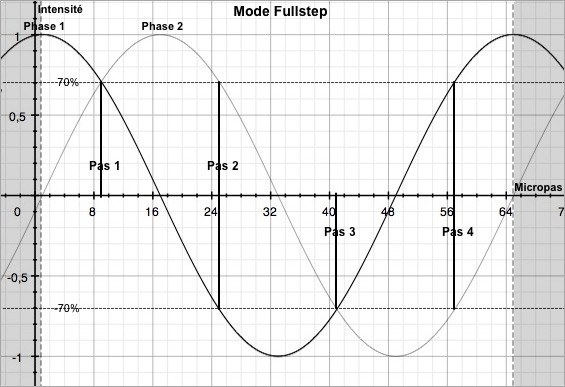
Dans le cadre de mes moteurs pas à pas unipolaires 6 fils (24 pas / 1v / 2 ohms), nous laissons les fils communs (fils rouge) non connectés pour utiliser les moteurs en mode bipolaires...

L’intensité en fullstep biphasé est de 0,354A (70% d’Imax) par bobine.
En appliquant les formules, cela nous donne:
Imax =1,4141*0,354
Imax = 0,500A -> le max que peuvent supporter les bobines de mes moteurs en unipolaire.
et par richochet:
Vref = 8*0,354*0,2
Vref = 0,801v
Il suffit donc de régler Vref à 0,8v (Attention: ce calcul peut être différent en fonction de la résistance Rcs du driver utilisé: StepStick, Pololu, etc).
Seule ombre au tableau, le moteur dispose d’un peu moins de couple en fullstep. Je préfère néanmoins rester sur ce réglage et réduire la vitesse max à 40x/45x la vitesse sidérale au lieu de 50x (la perte de couple se fait sentir et le moteur débraye au bout d’un moment en charge à 50x). En contrepartie, cela me permet de basculer en micropas ce qui donne beaucoup plus de fluidité et moins de vibrations aux moteurs.
Moteur P43GH démonté
De gauche à droite: le couvercle du carter, le moyeu avec son aimant permanent, les deux bobines de cuivre, le carter du bloc moteur avec son axe pour accueillir le moyeu...
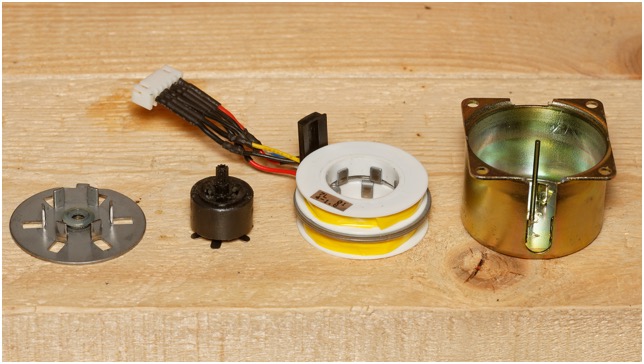
Le moteur entièrement clos avec sa démultiplication. Un léger coup de Dremel a été nécessaire pour désolidariser les pattes de la démultiplication…

Démultiplication retirée. On aperçoit le capot du carter…

Retrait du capot. Au milieu, le moyeu en place. C'est en fait un simple aimant qui va tourner en fonction des phases.

Moyeu retiré. On aperçoit 6 petites ailettes qui servent de "ressort" et évitent ainsi que le moyeu ne frotte sur le fond du carter lorsqu'il tourne...

Et voici les petites plaques en métal des phases du moteur. C'est elles qui vont se polariser lorsque le courant passe dans les bobines (parties blanches)…

Sur le principe, cela fonctionne comme ceci…

Moteur a six pas et quatre phases soit 24 pas complets (Source: wikipedia).
Bilan: tout est en parfait état côté moteur. Reste à voir si je peux lui faire une attelle avec un nouvel engrenage en impression 3D pour la pièce cassée de la démultiplication pour le rendre à nouveau opérationnel.

Démultiplication motorisation EM10 USD (suite)

Je constate que cette sous période est confirmée par des mesures de Christophe Demeautis avec une autre EM10 USD sur son site. Ce serait donc un phénomène récurrent avec le modèle USD...

La périodicité est un indice important. Une telle période est incompatible avec les engrenages externes (pignons moteur et pignon roue dentée) car elle est bien trop rapide. Il faut donc s’y coller côté démultiplication.
Partie un peu fastidieuse: le comptage des dents de chaque engrenage et des arbres. Pour me simplifier la tâche, j’ai opté pour de la photo macro de chaque engrenage. Voici un photo montage (engrenage masqués ajoutés en transparence) avec le comptage des dents…

Calcul de contrôle avec le logiciel Soulver pour 500 rotations (logiciel très pratique pour poser ce genre de calculs):
rotation_engrenage_moteur = 500 // 500 rotations
// Mouvement de dents
engrenage_moteur = rotation_engrenage_moteur × 10 // = 5 000 dents
engrenage_1 = engrenage_moteur/30 × 10 // = 1 666,6666666667 dents
engrenage_2 = engrenage_1/40 × 10 // = 416,6666666667 dents
engrenage_3 = engrenage_2/40 × 18 // = 187,5 dents
engrenage_4 = engrenage_3/30 × 10 // = 62,5 dents
engrenage_5 = engrenage_4/25 × 20 // = 50 dents
// Rotations des engrenages
rotation_engrenage_1 = engrenage_moteur/30 // = 166,6666666667 rotations
rotation_engrenage_2 = engrenage_1/40 // = 41,6666666667 rotations
rotation_engrenage_3 = engrenage_2/40 // = 10,4166666667 rotations
rotation_engrenage_4 = engrenage_3/30 // = 6,25 rotations
rotation_engrenage_5 = engrenage_4/25 // = 2,5 rotations
rotation_engrenage_6 = engrenage_5/50 // = 1 rotation
L’arbre moteur doit donc bien faire 500 tours pour un seul tour en sortie soit une démultiplication de 1/500. On est bon par rapport aux spécifications constructeur.
Reste à déterminer la périodicité de chaque engrenage pour recoupement avec l’erreur périodique de la monture. Il faut alors extrapoler sur 10min (période complète de la vis sans fin à vitesse solaire de référence). Avant toute chose, il nous faut le nombre de pas effectués en 10min soit: 25Hz*60*10 = 15 000 pas. Etant donné que nous somme en vitesse sidérale pour les mesures d’EP, le nombre de pas est en fait un peu plus élevé si l’on veut être précis: 15 041,068733 soit un ratio de 1,002738 que nous appliqueront en fin de calcul.
pas = 15000 // 15000 pas pour un tour de vis sans fin (si tout va bien ;) )
pas_moteur = 24 // Nombre de pas du moteur pour un tour complet
rotation_engrenage_moteur = pas/pas_moteur // = 625 rotations
// Mouvement de dents
engrenage_moteur = rotation_engrenage_moteur × 10 // = 6 250 dents
engrenage_1 = engrenage_moteur/30 × 10 // = 2 083,3333333333 dents
engrenage_2 = engrenage_1/40 × 10 // = 520,8333333333 dents
engrenage_3 = engrenage_2/40 × 18 // = 234,375 dents
engrenage_4 = engrenage_3/30 × 10 // = 78,125 dents
engrenage_5 = engrenage_4/25 × 20 // = 62,5 dents
engrenage_sortie_moteur = engrenage_5/50 × 36 // 45 dents
// Rotations des engrenages
rotation_engrenage_1 = engrenage_moteur/30 // = 208,3333333333 rotations
rotation_engrenage_2 = engrenage_1/40 // = 52,0833333333 rotations
rotation_engrenage_3 = engrenage_2/40 // = 13,0208333333 rotations
rotation_engrenage_4 = engrenage_3/30 // = 7,8125 rotations
rotation_engrenage_5 = engrenage_4/25 // = 3,125 rotations
rotation_engrenage_6 = engrenage_5/50 // = 1,25 rotations
rotation_vis_sans_fin = rotation_engrenage_6 × 36/45 // = 1 rotation de la vis sans fin (Oufff!!! On est bon!)
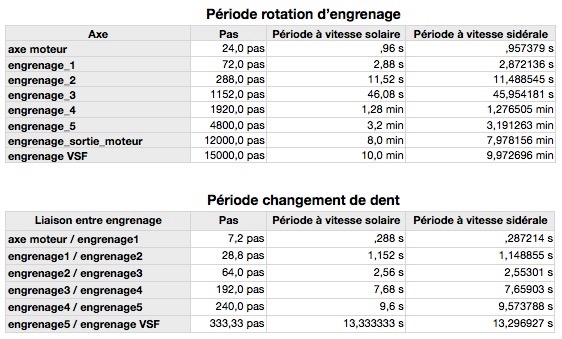
Nous voici à l’heure du bilan. Avec 7,8125 rotations (soit 7,83389 rotations rapporté à la vitesse sidérale) notre coupable semble tout indiqué: c’est l’engrenage 4 le fautif (gear_4 sur la photo) à la jonction entre engrenage alliage et engrenage plastique. La bonne nouvelle, c’est que nous avons maintenant une connaissance très précise de la sous période: 10 min / 7,8125 rotations / 1,002738=1,276506min. La moins bonne, c’est que cette erreur n’est pas sous multiple de l’erreur périodique principale ce qui va la rendre plus délicate à intégrer dans la correction PEC. Mais dans notre malheur, il y a une bonne chose à y regarder de plus près: 15000/7,8125 = 1920 pas. En d’autres termes: la sous période se reproduit tous les 1920 pas entiers.
Pour terminer, voici l’extrapolation de toutes les périodes incluant rotation complète des engrenages (effet potentiel de voilage) et les changements de dents (effet potentiel d’erreur d’usinage des dents)…
Veni, vidi, vici pour cette étape. :D
Démultiplication motorisation EM10 USD
Qu’à cela ne tienne! Je me suis mis en quête d’un moteur hors service d’EM10 USD sur les forums astro. Et pour mon plus grand plaisir, Rémi Petitdemange d’Optique Unterlinden (importateur de la marque Takahashi) a répondu présent et m’a envoyé gracieusement un moteur pour étude. Un big big merci Rémi! ;)
Dès réception, la dissection a donc commencé…

Il y a plus qu’à compter tout ça et voir ce qu’il en ressort…

Affaire à suivre.
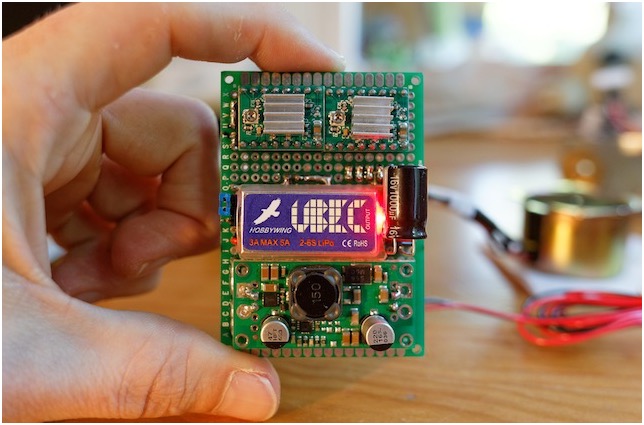
Début de prototypage de la partie puissance
A terme les composants seront positionnés vers l’intérieur de la monture pour minimiser l’épaisseur de la façade.
Pour l’instant tout n’y est pas encore. En bas nous avons un régulateur (qui va être remplacé par un modèle plus haut de gamme) et le bouton de mise en marche. Au milieu un condensateur pour amortir les pointes de surtension. Et en haut les deux drivers de moteur pas à pas A4988.
D’ailleurs au passage, voici un article très intéressant qui fait la part belle au A4988…
http://hackaday.com/2016/08/29/how-accurate-is-microstepping-really/
Il reste un peu de place sur le pcb pour la led du viseur polaire, un régulateur pour abaisser la tension 12v à 5V pour l’alimentation du Arduino de la raquette de commande, un connecteur vers la raquette. Je me tâte aussi à installer les connectiques ST4 et l’USB directement sur la monture. Cela éviterait les câblages externe sur la raquette. Réflexion à poursuivre… :)
Article étude mécanique et électronique de l'EM10 USD
http://em10-usd-arduino-takahashi.eliotis.com/etude-em10-takahashi/index.html

Mesures de l'électronique de l'em-10 USD
Je reviendrais dans un prochain billet sur le câblage mais première chose importante constatée: les moteurs 1Volt / 2 Ohms sont en fait alimentés en… 12 volts!!!

Voilà qui explique sans doute la phrase d’avertissement dans la documentation d’origine de Takahashi. Je cite:
« Attention: une sollicitation prolongée (plus d’une minute en continu) des déplacements en vitesse rapide 50 X peut endommager le circuit électronique de votre monture. »
Deuxième mesure intéressante, la période des impulsions en vitesse sidérale au niveau d’une bobine du moteur unipolaire en AD est de 6,244Hz.
Le calcul suivant nous permet de déterminer l’erreur résiduelle:
// Mesures
FrequenceBobine = 6,244 Hz
FrequencePas = FrequenceBobine × 4 = 24,976 Hz
// Caractéristiques moteur
NombreDePasMoteur = 24 pas
Demultiplication = 1/500 = 0,002
VitesseMoteur = 60 × FrequencePas / NombreDePasMoteur × Demultiplication = 0,12488 tr/min
// Engrenages intermédiaires
NombreDeDentsEngrenageMoteur = 36 dents
NombreDeDentsEngrenageVisSansFin = 45 dents
DémultiplicaitionEngrenages = NombreDeDentsEngrenageMoteur/NombreDeDentsEngrenageVisSansFin = 0,8
// Vis sans fin
VitesseVisSansFin = VitesseMoteur × DémultiplicaitionEngrenages = 0,099904 tr/min
NombreDeDentsRouteDentéeAD = 144 dents
// Vitesse sidérale monture
PeridodeVitesseSideraleMonture = NombreDeDentsRouteDentéeAD/VitesseVisSansFin = 1 441,38 min
// Vitesse sidérale parfaite : 23h56m04s
PeriodeVitesseSideraleParfaite = 23*60+56 + 4/60 = 1 436,07 min
// Erreur (ratio théorie/pratique)
(1-PeridodeVitesseSideraleMonture/PeriodeVitesseSideraleParfaite) × 100 = -0,37%
A noter que si l'on prend une « vitesse sidérale parfaite » arrondie à 24h, l’erreur résiduelle tombe à -0,096%. Il est donc probable que les ingénieurs de Takahashi se soient simplifiés la tâche à l’époque.
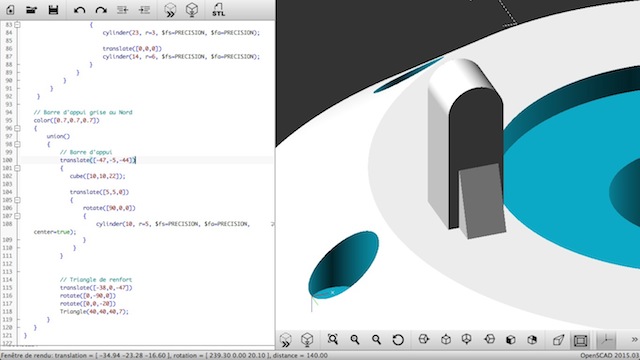
Prototypage de la raquette de commande avec OpenSCAD

Pas assez parlant? Ok. Une connaissance de mon Fab lab ayant eu la bonne idée de m’initier à OpenSCAD, voici donc un début d’ébauche que je vais peaufiner avec le temps (le squelette en carton est ici représenté en bleu)…
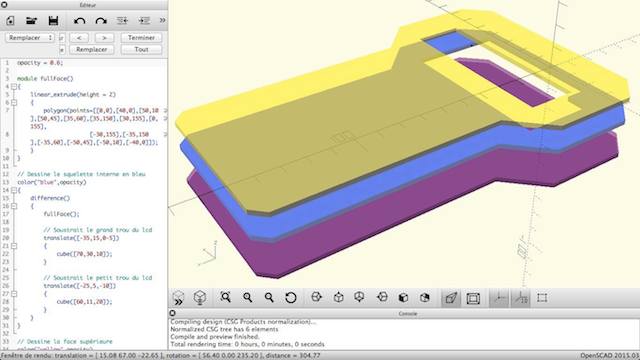
A terme le but est de modéliser l’ensemble des pièces électroniques pour contrôler leur intégration et au final réaliser la raquette de commande avec une imprimante 3D.
Moteurs pas à pas de l'EM-10 USD

Il s’agit de deux moteurs unipolaires 6 fils avec pour caractéristiques:
- 2 Ohms.
- 1 Volt.
- 24 pas.
- démultiplication de 1/500.
Dans l’immédiat, faute de mieux, j’ai mesuré le courant à l’ampèremètre côté batterie. Voici ce qui en ressort:
Conso au « repos » (vitesse sidérale en AD): 0,48A
Mouvement rapide en AD: 1,16A.
Mouvement rapide en Dec: 1,64A.
Mouvement rapide en AD et Dec: 2,32A.
Dans la foulée, j'ai remis la main sur la doc d'origine:
>>Motorisation:
>> - pas à pas quartz 50 pulsations/sec.
>> - rattrapage rapide Alpha 50x (la vitesse sidérale)
>> - rattrapage rapide delta 750" d'arc/sec.
>> - rattrapage fins alpha +/- 1.1 à 1.9x la vitesse sidérale.
>> - rattrapage fins delta +/- 1.5 à 13.5" d'arc/sec.
>>Consommation:
>> - 500mA en vitesse sidérale et rattrapage lents.
>> - 2.5A en vitesse rapide.
>>Alimentation:
>> - 12V continu.
J’ai évoqué ces caractéristiques avec un électronicien de métier de mon Fab lab local. Il en ressort que la partie puissance risque d’être plus complexe que je l’espérais. Affaire à suivre avec un passage à l’oscilloscope pour caractériser l’électronique actuelle. La première étape sera de mettre en place des connecteurs entre les moteurs et le circuit de puissance.
Modification des moteurs pas à pas de l'EM-10 USD

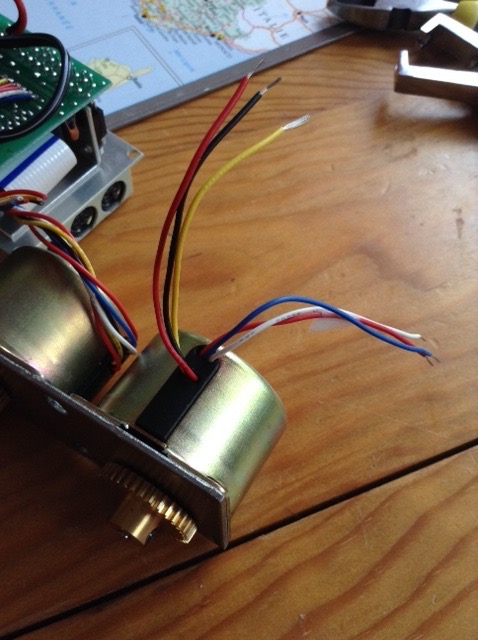
Je pourrais maintenant interchanger d'électronique à loisir le temps du prototype...


J'en ai profité pour mesurer les fils des bobines. Les résultats sont cohérents avec les specs à l'erreur de mesure près de mon ohmmètre. Il faut se faire un raison. Avec 2 ohms de résistance et 1 volt de tension, on est loin des standards habituels.
Présentation du projet
- Calibration plus précise de la vitesse sidérale.
- Rattrapage automatique du backslash sur la déclinaison.
- Correction d'erreur périodique par modulation de fréquence.
- Interface d'autoguidage modernisée (genre protocole LX200).
- Goto relatif.
- Etc.