


MKS MINI aux commandes...
https://www.youtube.com/watch?v=ckrY5U3mfkkLe projet a bien évolué depuis ses débuts. Simplifions, simplifions, simplifions! Reste à intégrer une led d’éclairage pour le viseur polaire, prévoir une connectique pour le câble de la motorisation de la mise au point et ajouter la deuxième connectique DB-9 pour la future télécommande tactile. A partir de là on sera pas mal niveau matériel côté monture.

Test motorisation mise au point du CN-212
Motorisation de la molette de mise au point du CN-212
- ne pas toucher au tube: le système ne doit nécessiter aucun perçage.
- facile à monter/démonter en quelques secondes et sans outils dans le noir en cas de besoin.
- on doit pouvoir continuer à utiliser la molette en manuel.
- cela ne doit pas dénaturer le télescope. :)
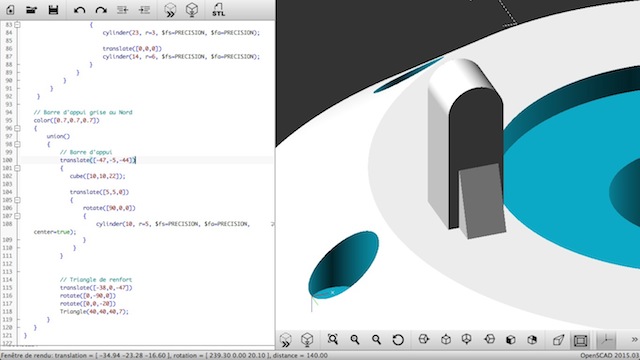
On mélange tout ça avec OpenSCAD et -quelques prototypes plus tard- abracadabra...

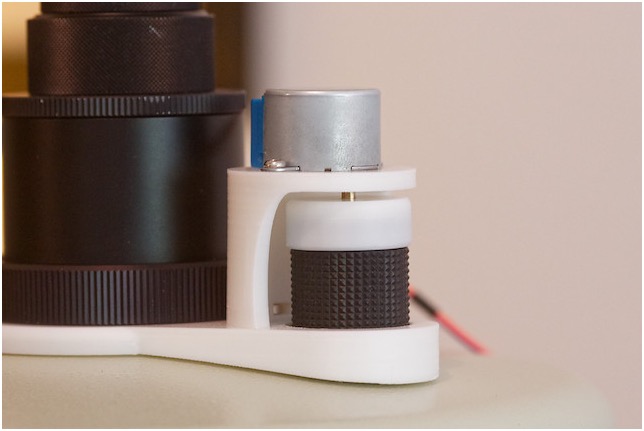
Le concept est simple. La platine est solidarisée via le porte oculaire. Et un manchon, ajouré pour accueillir l’axe moteur, vient s’enficher sur la molette de mise au point.
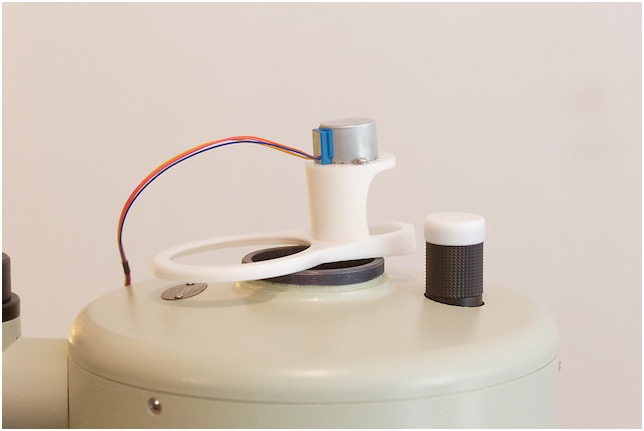
Le tour est joué...


Voilà qui devrait être parfait pour boucler la boucle en complément du contrôle de la monture.
C'est reparti... :)
Donc on récapitule:
- revoir l’électronique de la monture pour qu’elle soit plus simple à concevoir et pourquoi pas encore moins chère?
- déporter l’écran dans une raquette déportée.
- prévoir de piloter la mise au point.
Ok on en est donc là ou presque puisque j’ai déjà avancé sur la question vous vous en doutez. :) Concernant l’électronique, je pense avoir trouvé mon bonheur avec une carte pour imprimante 3D que je vais hacker pour mon usage: la MKS Mini V2.0 Makerbase.

Elle a tout pour me plaire:
- basée sur un Arduino MEGA dans la continuité de mon projet.
- dimensions relativement compactes.
- 4 drivers 4988 afin de piloter à la fois les deux moteurs pas à pas du télescope et potentiellement deux autres périphériques.
- technologie éprouvée puisque dérivée de la Mks standard équipant nombre d’imprimantes 3D DIY.
- tout petit prix: à peine plus de 20€ avec les frais de port sur aliexpress.com.
Il n’en fallait pas plus pour me lancer sur cette piste!
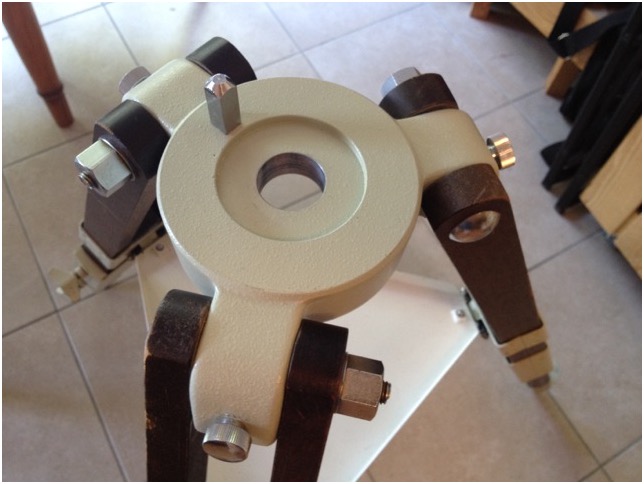
Je vous présente donc mon nouveau prototype déjà installé en bonne place sur ma monture (merci l’impression 3D)... :)
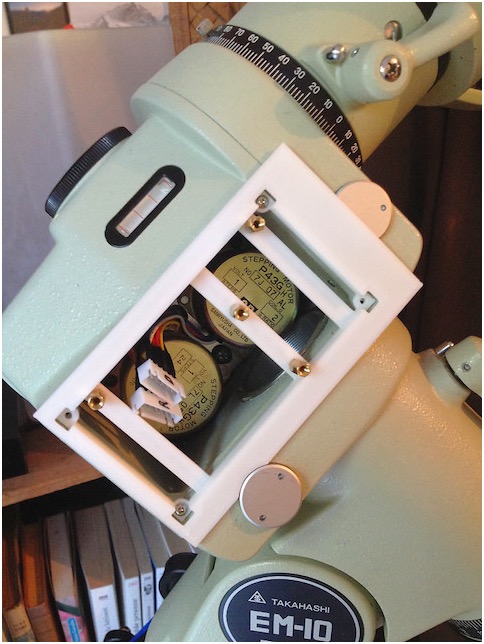
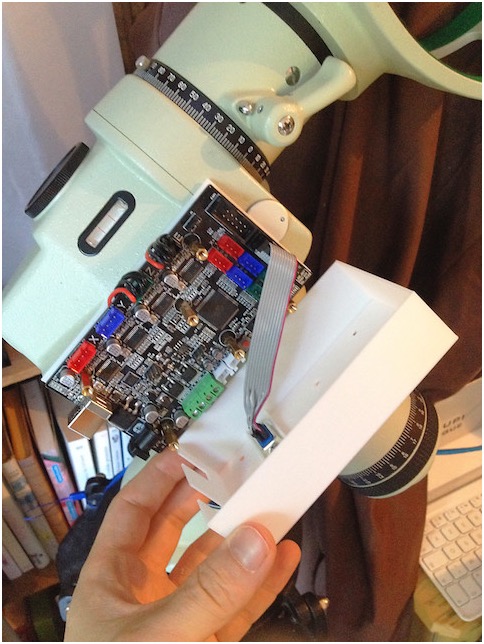

La manette SEGA a été conservée et j’ai prévu un second port DB9 pour la raquette de contrôle qui exploitera l’ancienne carte Arduino équipée de l’écran tactile. Ce dernier s’occupera de l’intelligence (base de donnée, GPS, GOTO, abaque polaire) et la carte Mks s’occupera des moteurs et du PEC.
Platine d'adaptation EM10/trépied Meade




A partir de là, le modèle 3D a été réalisé par mes soins sous OpenSCAD en prenant les cotations au pied à coulisse sur la monture et le trépied…

Puis la fabrication a été laissée au bon soin d’un ami disposant d’une imprimante 3D (25h d’impression tout de même! Merci Richard! :) )…

Avancement de l’impression...

Et voici la platine finale mise en place sur le trépied Meade...

Installation de la monture: comme papa dans maman… :)


Pas de doute, ça a de la gueule… :)

Reste à prévoir la tige filetée de remplacement de l’écarteur d’origine. Elle viendra solidariser la monture avec le trépied en passant par le trou central du dessous.
Si cette platine vous intéresse, j’ai mis le STL à disposition sur thingiverse.com…
>>>> Adapter for Takahashi Mount with Meade Field Tripod <<<<
Un nouveau pied, c'est le pied!

Merci au passage à mon copain Fabrice qui m’en a fait cadeau! Un trépied massif flambant neuf dans son emballage cela ne se refuse pas! :D
Installation d'un Arduino Mega et d'un LCD


Sega c'est plus fort que Taka...

Pour les amateurs du genre, le code est dispo sur mon github. Plus de détails ici…
Réglage de drivers A4988 StepStick
http://reprap.org/wiki/StepStick
Voici les formules:
Imax = Vref/(8*Rcs) ou reformulé pour Vref: Vref = 8*Imax*Rcs
Avec:
- Vref: tension de référence du potentiomètre.
- Imax: tension maximale globale.
- Rcs: résistance de référence = 0,2 ohm pour les StepStick.
L’intensité max (par bobine) en fullstep peut être calculée par la formule:
Imax = √( (I bobine1)^2 + (I bobine2)^2 )
Comme l’intensité est la même dans les deux bobines:
Imax = √( (I bobine)^2 + (I bobine)^2 )
Imax = √( 2*(I bobine)^2 )
Imax = √2 * I bobine
Imax = 1,4142 * I bobine
En d’autres termes et pour faire simple: en fullstep les bobines sont alimentés à 70% seulement. Cela est dû au fait que le driver n’a pas de mode fullstep dédié. Il se cale simplement sur sa table de microstepping. Un graphique parle plus que de longs discours…
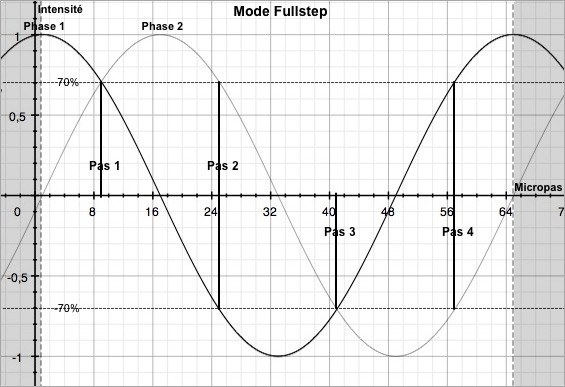
Dans le cadre de mes moteurs pas à pas unipolaires 6 fils (24 pas / 1v / 2 ohms), nous laissons les fils communs (fils rouge) non connectés pour utiliser les moteurs en mode bipolaires...

L’intensité en fullstep biphasé est de 0,354A (70% d’Imax) par bobine.
En appliquant les formules, cela nous donne:
Imax =1,4141*0,354
Imax = 0,500A -> le max que peuvent supporter les bobines de mes moteurs en unipolaire.
et par richochet:
Vref = 8*0,354*0,2
Vref = 0,801v
Il suffit donc de régler Vref à 0,8v (Attention: ce calcul peut être différent en fonction de la résistance Rcs du driver utilisé: StepStick, Pololu, etc).
Seule ombre au tableau, le moteur dispose d’un peu moins de couple en fullstep. Je préfère néanmoins rester sur ce réglage et réduire la vitesse max à 40x/45x la vitesse sidérale au lieu de 50x (la perte de couple se fait sentir et le moteur débraye au bout d’un moment en charge à 50x). En contrepartie, cela me permet de basculer en micropas ce qui donne beaucoup plus de fluidité et moins de vibrations aux moteurs.
Article étude mécanique et électronique de l'EM10 USD
http://em10-usd-arduino-takahashi.eliotis.com/etude-em10-takahashi/index.html
