


Sous les étoiles...

Le temps était clair mais trop turbulent pour shooter la Lune. J’en ai donc profité pour prendre quelques échantillons de test pour mon algorithme de détection d’image et comparer quelques images avec ma base de donnée. :)

Calibration de l'axe polaire
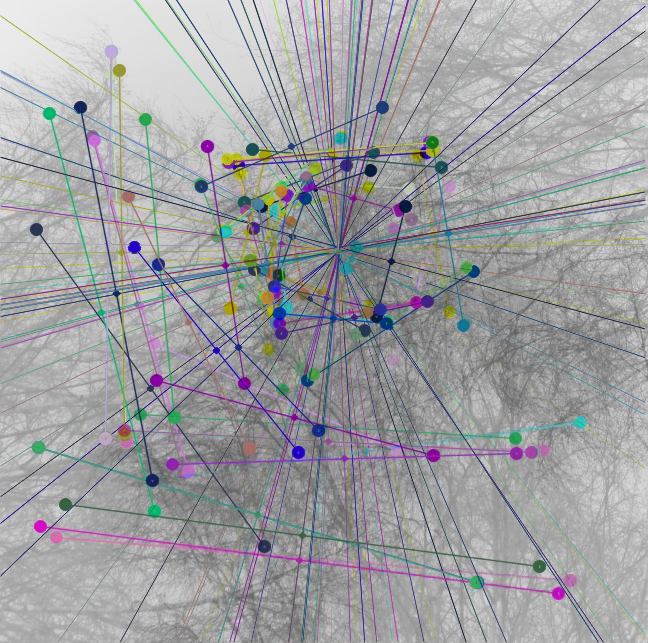
« Médiatrice: en géométrie plane, la médiatrice d'un segment est l'ensemble des points équidistants des deux extrémités du segment. Cet ensemble est la droite passant par le milieu du segment et qui est perpendiculaire au segment. »
On commence par déterminer des points de référence entre les clichés...
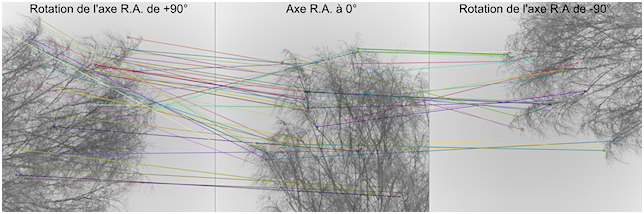
Lors d'une rotation de 90° les points de référence tournent en rond autour de l'axe mécanique d'ascension droite (l'axe qu'on aligne avec le pôle nord céleste). Si l'on trace la médiatrice de chaque segment, l'intersection des médiatrices nous montre le point de rotation. Ici on constate qu'il est un peu plus haut que le centre du capteur.
CQFD.
Test de détectivité de la camera PI

Évènement exceptionnel: Conjonction Lune / Lampadaire!!!

Plus sérieusement, j’avance sur le pilotage de la caméra du Raspberry PI. Il existe bien le projet picamera en Python mais je souhaite quelque chose de plus performant, que ce soit au niveau des ressources CPU que mémoire, afin de tourner correctement à terme sur un PI Zéro. C’est donc le C/C++ que je privilégie. Et là les choses se gâtent sous Raspbian. Par exemple, la librairie de traitement d’image OpenCV propose bien le support de la cam mais uniquement en flux vidéo automatisé. A noter qu’il est possible de modifier certains paramètres via la méthode set (ex: CV_CAP_PROP_SATURATION) de la classe VideoCapture. Elle fait appel au driver V4L mais dans les faits c’est très limité. Impossible par exemple de régler l’exposition de ma caméra: « HIGHGUI ERROR: V4L: Property Exposure(15) not supported by device) ». Hors dans mon cas, il est nécessaire d’accéder à l’ensemble des pixels de l’image (mode « still ») avec une gestion manuelle de la caméra (exposition, balance des blancs, réglage du gain analogique, etc). Bref, pour arriver à mes fins, je suis donc contraint de coder une version modifiée à ma sauce de raspistillyuv.
Niveau IDE de développement il n’y a pas grand chose de potable à mon goût. J’ai donc décidé de faire comme sur Arduino et d’utiliser l’IDE Xcode sur mon Mac pour avoir un éditeur digne de ce nom (code completion, refactoring, recherches avancées, etc). La mise en oeuvre est un peu plus complexe car cela nécessite de mettre en place des scripts de compilation à distance via un canal SSH mais ça y est ça tourne... :)

Cerise sur le gâteau: XQuartz me permet d’avoir la fenêtre de l’application PI directement sur le Mac (le code s’exécute sur le PI mais l’interface graphique est déportée sur le PC). Je peux maintenant coder sur mon PI avec un minimum de confort! :)