


avr. 2019
One more thing...
06/04/2019 12:53 Rangé dans:Actualité
Je ne dirais qu’une chose: qui peut l'EM-10, peut l'EM-200...

- Mon EM-10 USD II de 1998 à côté de ma nouvelle flambant vieille EM-200b de 1991. -
Surtout si ma dernière version de boitier a été pensée d’entrée pour être compatible au millimètre près... ;)
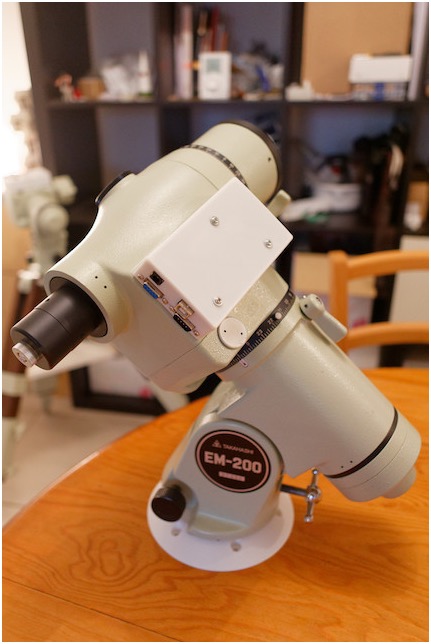
La motorisation poussive de l’EM-200b devra être revue mais cela aussi est à l’ordre du jour très prochainement sur l’EM-10.
Point sur le projet...
06/04/2019 12:52 Rangé dans:Actualité
Voici l’EM-10 en l’état d’avancement. Le projet a fait un sacré chemin depuis ses débuts! Cela commence à avoir vraiment de la gueule...


Le boitier abritant la carte MKS a été repensé en positionnant les composants face à l’intérieur de la monture. Cela m’a permit de placer tous les connecteurs en bas mais aussi par la suite de dégager de l’espace pour le passage de l’encodeur de l’axe R.A...
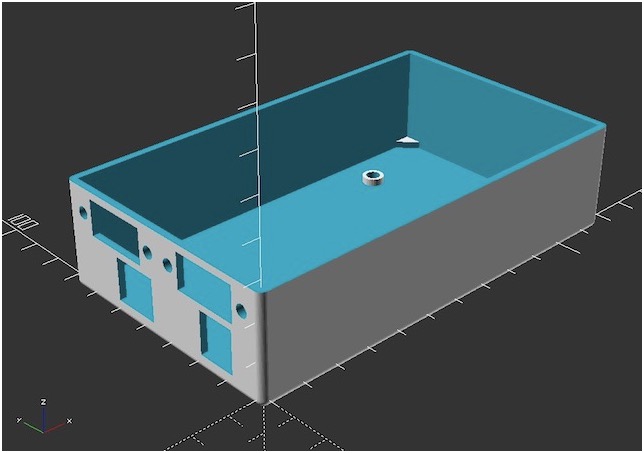

La tension d’alimentation est maintenant régulée par un Pololu S18V20F12 12V Step-Up/Step-Down (récupération de mon tout premier proto) mis en boiter avec interrupteur...


Et pour finir j’ai revu le boitier du PI Zero du proto de viseur polaire en l’inclinant de 90° pour un accès plus pratique aux ports par le dessous...
Restera à voir le connecteur du câble du moteur de mise au point du CN-212 qui dans l’immédiat est encore câblé directement en interne sur la carte. Je pense partir sur du RJ-9 histoire d’avoir quelque chose de compact.
Le boitier abritant la carte MKS a été repensé en positionnant les composants face à l’intérieur de la monture. Cela m’a permit de placer tous les connecteurs en bas mais aussi par la suite de dégager de l’espace pour le passage de l’encodeur de l’axe R.A...
La tension d’alimentation est maintenant régulée par un Pololu S18V20F12 12V Step-Up/Step-Down (récupération de mon tout premier proto) mis en boiter avec interrupteur...
Et pour finir j’ai revu le boitier du PI Zero du proto de viseur polaire en l’inclinant de 90° pour un accès plus pratique aux ports par le dessous...
Restera à voir le connecteur du câble du moteur de mise au point du CN-212 qui dans l’immédiat est encore câblé directement en interne sur la carte. Je pense partir sur du RJ-9 histoire d’avoir quelque chose de compact.
Le projet OnStep SHC utilise Ephemeris...
06/04/2019 12:40 Rangé dans:Actualité
Tout est résumé dans le titre: le projet OnStep Smart Hand Controller utilise ma librairie Ephemeris pour le calcul des éphémérides planétaires. il s’agit en fait d’une extension d’OnStep destinée à réaliser une raquette de commande autonome pour ce projet...
Voilà qui fait plaisir! :)
Vous pouvez en découvrir plus dans cet article...
https://baheyeldin.com/astronomy/onstep-esp32-smart-hand-controller-shc.html
Voilà qui fait plaisir! :)
Vous pouvez en découvrir plus dans cet article...
https://baheyeldin.com/astronomy/onstep-esp32-smart-hand-controller-shc.html
Encodeur pour l'axe R.A.
06/04/2019 10:48 Rangé dans:Actualité
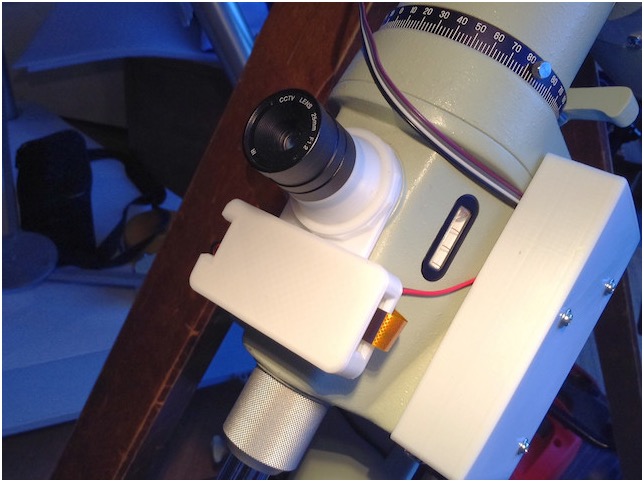
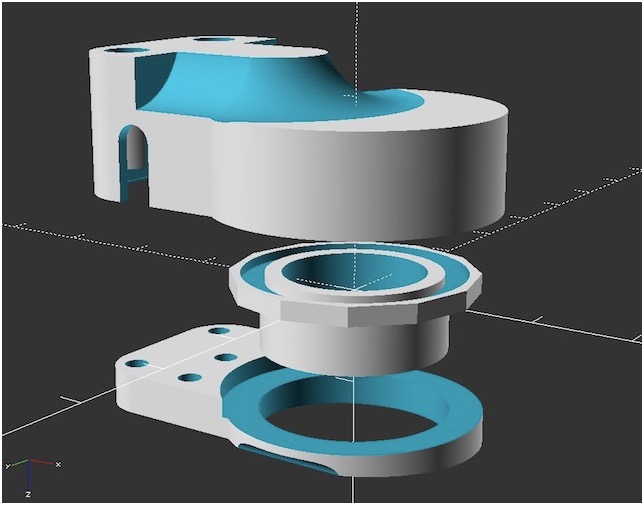
Dans la série "encore une idée à la con", voici ma dernière réalisation en impression 3D: support d'encodeur sur mesure pour l'axe R.A de mon EM-10 Taka...
Le sushi c'est que rien n'est droit sur cette monture! Qu'à cela ne tienne: passage ne mode "haute couture » sous OpenSCAD...


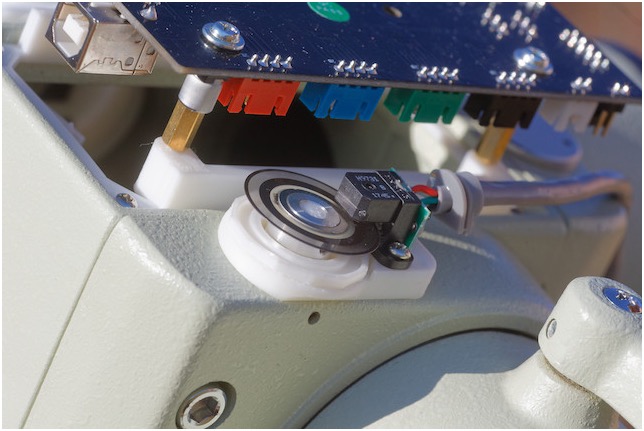
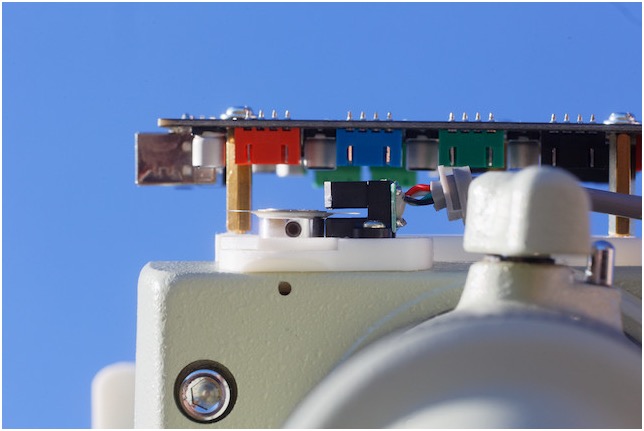
C’est moi ou bien il a un petit côté Star Trek Enterprise ce cache? :D

Là où cela devient intéressant c'est que mon idée est d'essayer d'utiliser l'encodeur pour asservir la vitesse (et non la position) et, si cela marche, compenser les erreurs périodiques en amont de la vis sans fin (démultiplication du moteur et les deux engrenages de transmission). Cela permettrait de mettre au point un PEC double étage mêlant l'asservissement de vitesse en cascade avec une mémorisation PEC classique pour la vis sans fin. Vous me suivez?
Le sushi c'est que rien n'est droit sur cette monture! Qu'à cela ne tienne: passage ne mode "haute couture » sous OpenSCAD...
C’est moi ou bien il a un petit côté Star Trek Enterprise ce cache? :D
Là où cela devient intéressant c'est que mon idée est d'essayer d'utiliser l'encodeur pour asservir la vitesse (et non la position) et, si cela marche, compenser les erreurs périodiques en amont de la vis sans fin (démultiplication du moteur et les deux engrenages de transmission). Cela permettrait de mettre au point un PEC double étage mêlant l'asservissement de vitesse en cascade avec une mémorisation PEC classique pour la vis sans fin. Vous me suivez?